
原文链接:https://mp.weixin.qq.com/s/1pqHq7ZaLdRq3Us8nJf3sw
前言
对于高级别自动驾驶系统而言,精确、完整的车道级高精地图是实现安全可靠路径规划的基石。车道图(Lane Graph
)作为高精地图的核心,不仅需要描绘车道中心线的几何形状,更要准确表达它们之间的拓扑连接关系。然而,现实世界的道路网络极其复杂,包含环岛、立交桥、双向单车道等非线性结构,这给传统的车道图构建方法带来了巨大挑战。现有方法或难以捕捉全局拓拓扑,或无法处理闭环结构,限制了其在复杂场景下的应用。
为了突破这些局限,高德地图视觉技术团队提出了一种全新的车道图生成框架——SeqGrowGraph。该方法颠覆了以往将图视为整体进行处理的思路,创新性地将车道图的构建过程建模为一个链式图扩展(Chain of Graph Expansions)过程。这种增量式的构建方式模拟了人类绘制地图的直观逻辑:从一个点开始,逐步添加新的元素并建立连接,最终形成完整的网络。
🌎 论文标题: SeqGrowGraph: Learning Lane Topology as a Chain of Graph Expansactions
📚 论文链接: https://arxiv.org/pdf/2507.04822
💻 代码链接: https://github.com/MIV-XJTU/SeqGrowGraph
背景与动机
当前,车载感知系统构建局部高精地图(在线建图)已成为行业热点。车道图生成作为其中关键一环,主流技术路线可分为基于检测和基于生成两类。
- 基于检测的方法:通过检测车道线的像素、片段或路径来构建地图。这类方法虽然直观,但通常需要复杂的后处理来连接离散的检测结果,容易产生断连、冗余或拓扑错误,难以形成完整连贯的道路网络。
- 基于生成的方法:利用序列到序列(Seq2Seq)模型的强大能力,将图结构转换为序列进行预测。这类方法在捕捉结构化信息方面展现了巨大潜力。然而,现有工作大多依赖有向无环图(DAG)假设,这使得它们无法自然地表达现实中常见的闭环(如环岛)和双向道路,并且复杂的图到序列转换规则可能破坏图的内在结构。
我们不禁思考:人类是如何理解和绘制道路网络的?通常不是一次性构建全局,而是采用“从点到线,由线及网”的增量式策略。
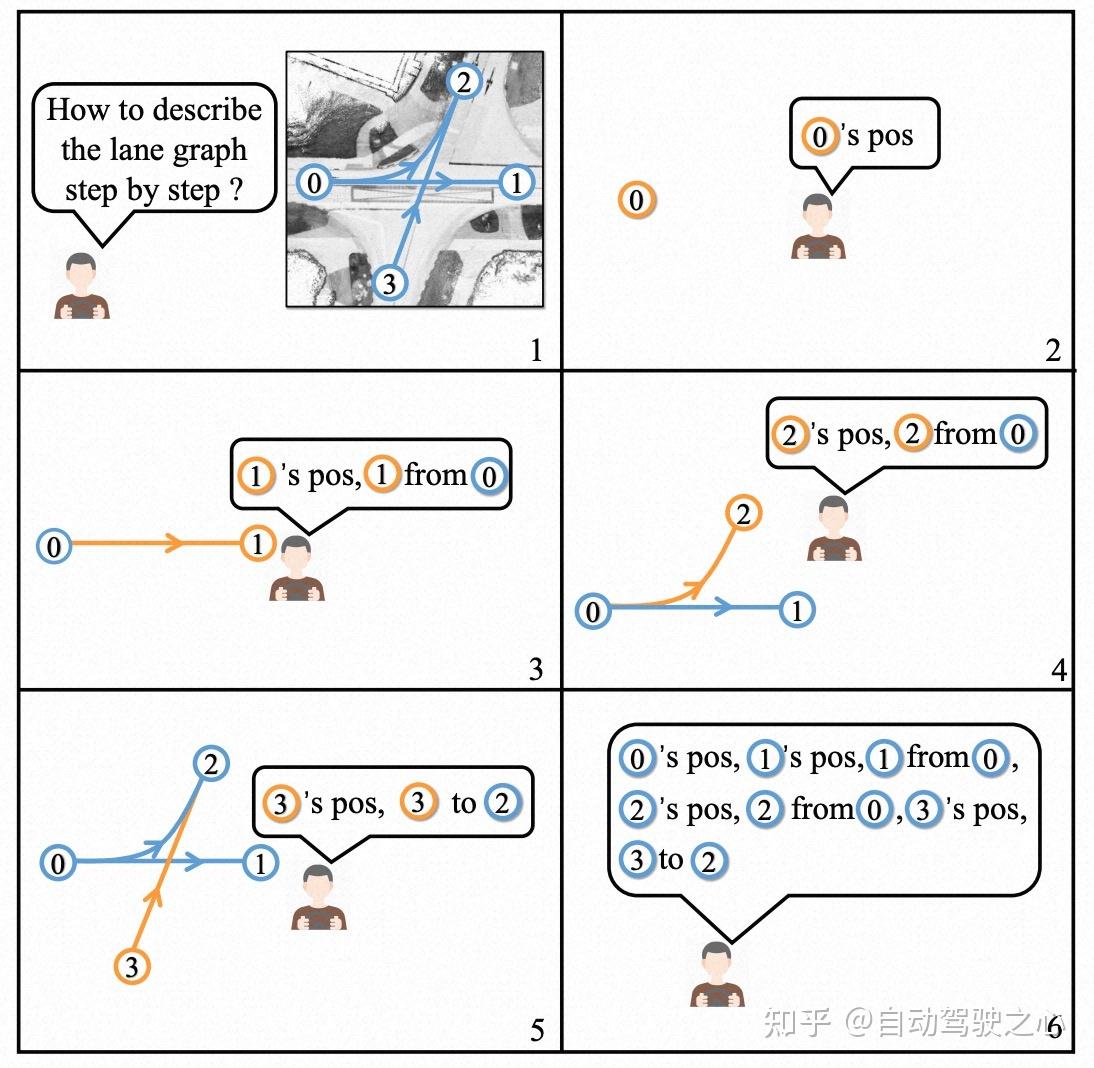
受此启发,我们提出了SeqGrowGraph,其核心思想是将车道图的构建过程分解为一系列原子的图扩展步骤,并利用自回归模型学习这一动态生成过程。
核心方法:链式图扩展
SeqGrowGraph将车道图定义为一个有向图 G=(V, E),其中 V 代表交叉口或关键拓扑节点,E 代表连接节点的车道中心线。图的构建通过以下链式扩展步骤增量式完成:
- 引入新节点:在每一步,模型引入一个带有其空间位置的新节点。
- 扩展邻接矩阵:邻接矩阵
A从n×n扩展至(n+1)×(n+1)。新增的行和列用于编码新节点与所有已存在节点之间的连接关系(“from”关系和“to”关系)。 - 更新几何矩阵:几何矩阵
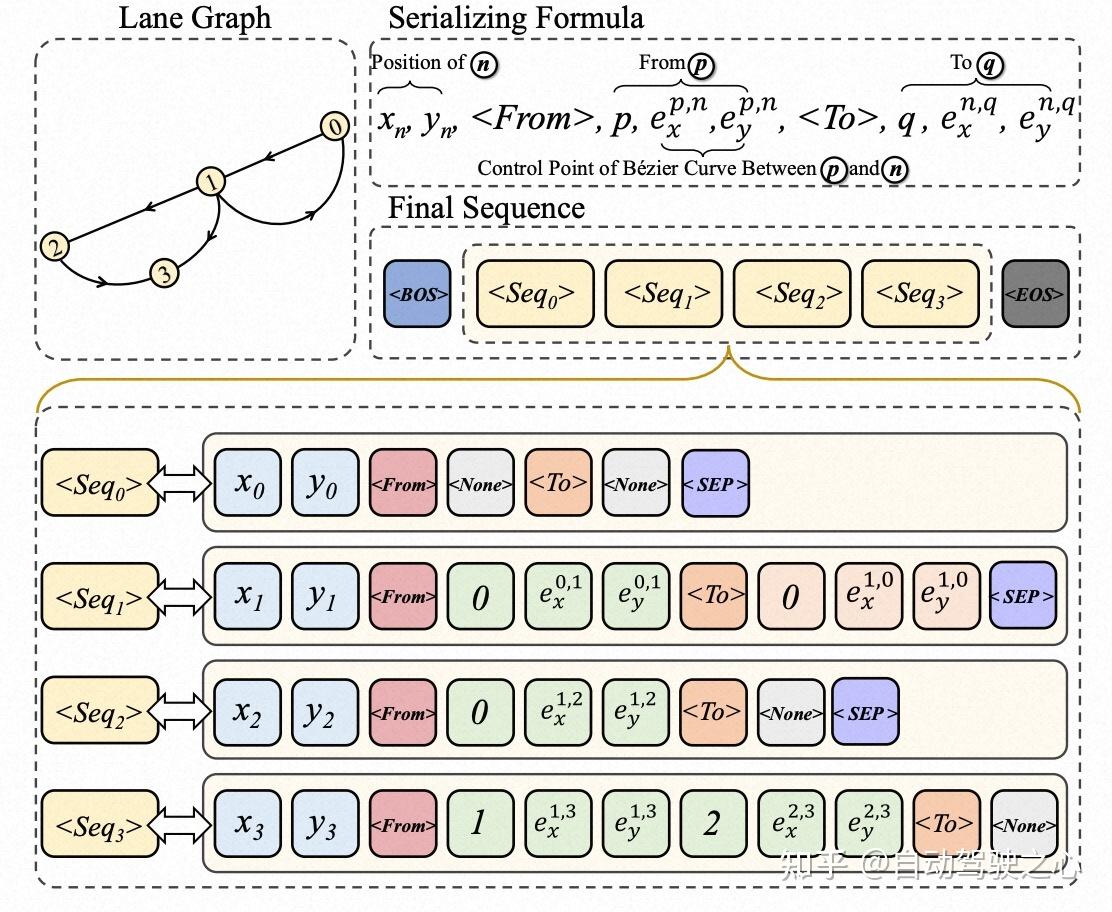
M被同步更新,以存储新增车道中心线的形状。我们采用二次贝塞尔曲线来精确描述中心线的弯曲形态。 - 序列化与自回归预测:整个图的构建过程(即一系列的图扩展操作)被序列化。我们采用深度优先搜索(DFS)顺序来组织扩展步骤,然后利用一个基于Transformer的解码器来自回归地预测这个序列。
下图直观展示了邻接矩阵的扩展过程。每引入一个新节点(如节点4),我们仅需定义它与已有节点(节点1, 2, 3)的拓扑关系,对应于扩展后邻接矩阵的新增行和列。
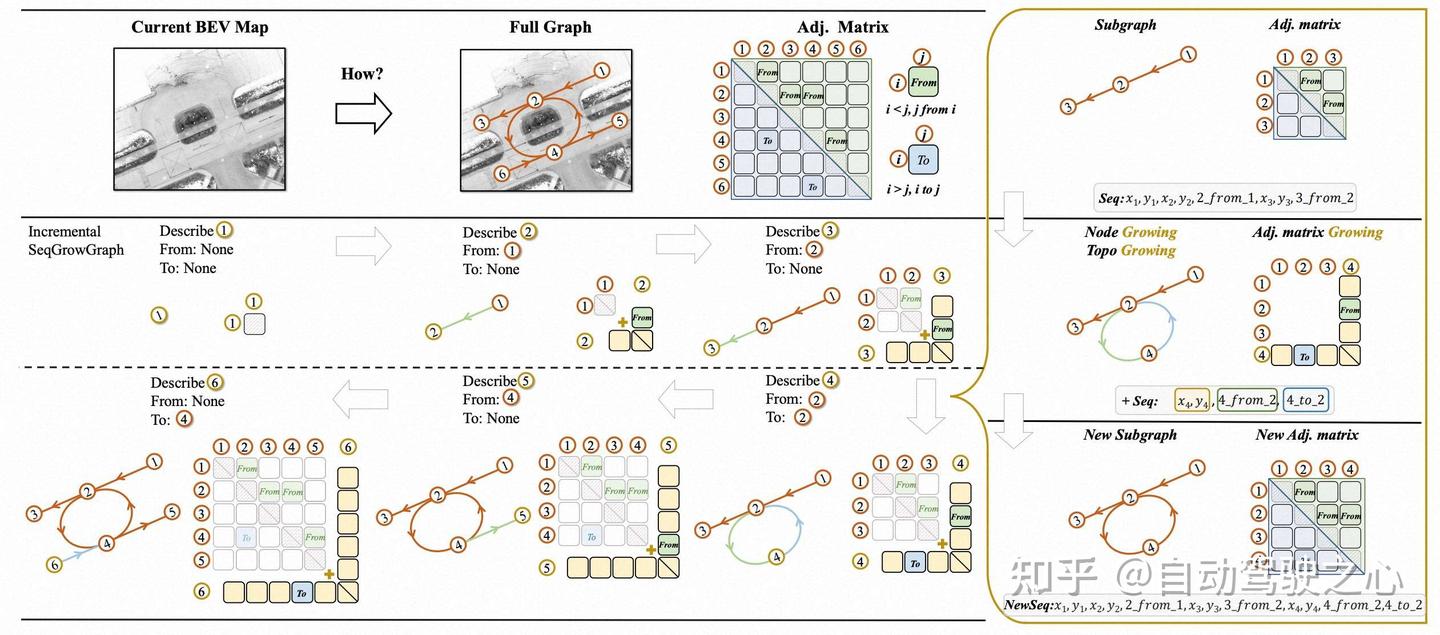
通过这种方式,复杂的图结构被优雅地分解为一个线性的、易于学习的序列。每个节点的子序列包含了其位置、拓扑连接信息和几何形状,完整地描述了该节点的扩展步骤。
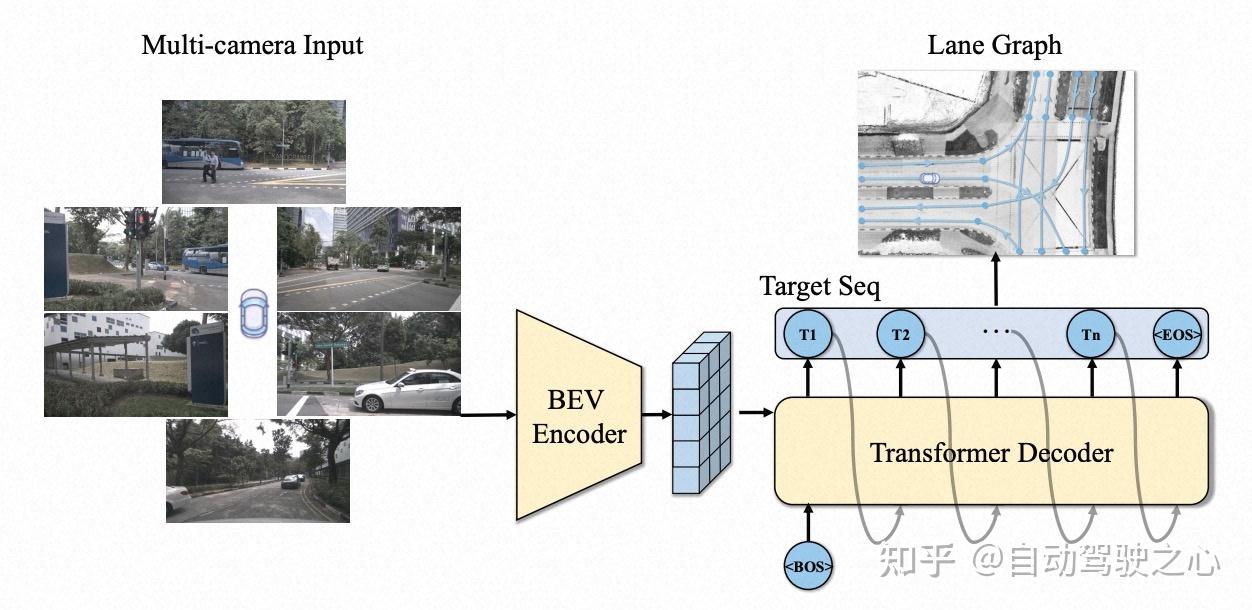
模型架构
模型整体遵循主流的Encoder-Decoder架构。首先,BEV编码器(如LSS)从环视相机图像中提取特征并投影至鸟瞰视图(BEV)空间。随后,一个Transformer解码器
以自回归的方式,逐个token地生成代表整个图扩展过程的目标序列。
实验验证
我们在大规模自动驾驶数据集 nuScenes 和 Argoverse 2
上对SeqGrowGraph进行了全面评估,并与领域内的前沿方法进行了比较。
定量分析
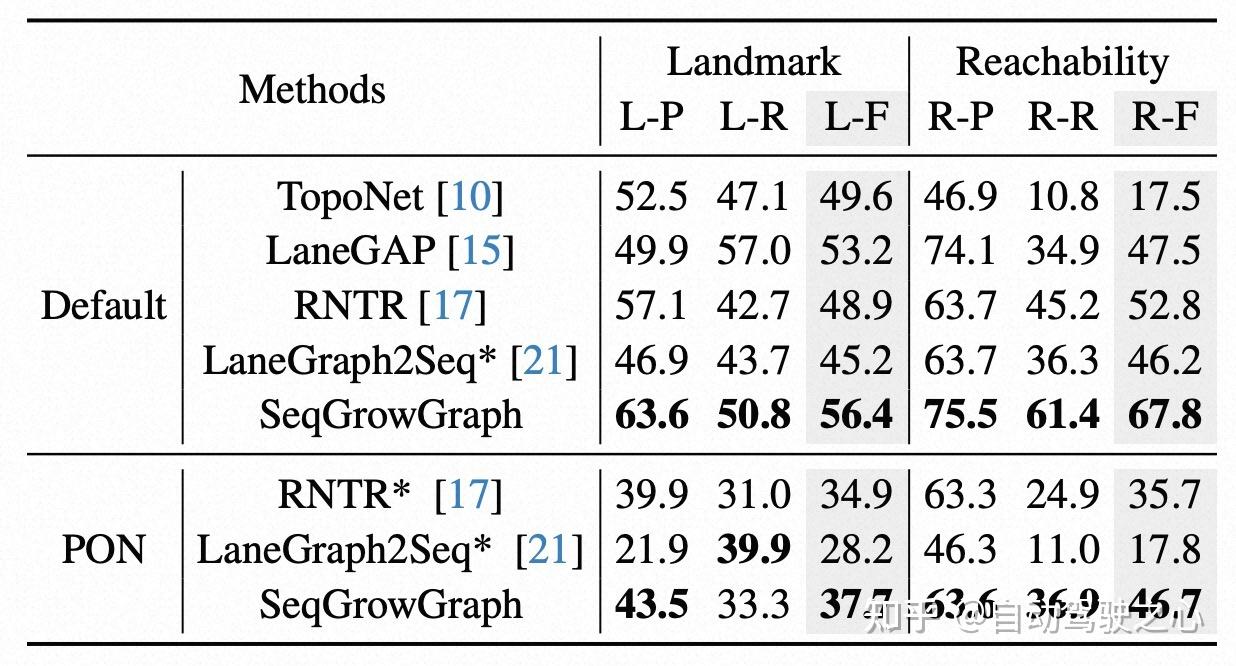
如下表所示,在nuScenes数据集上,无论是在标准的default划分还是更具挑战性的PON划分(训练集与测试集场景无重叠)上,SeqGrowGraph在评估拓扑准确性的Landmark和Reachability指标上均取得了最优性能(SOTA)。这证明了我们方法的高准确性和强大的泛化能力。
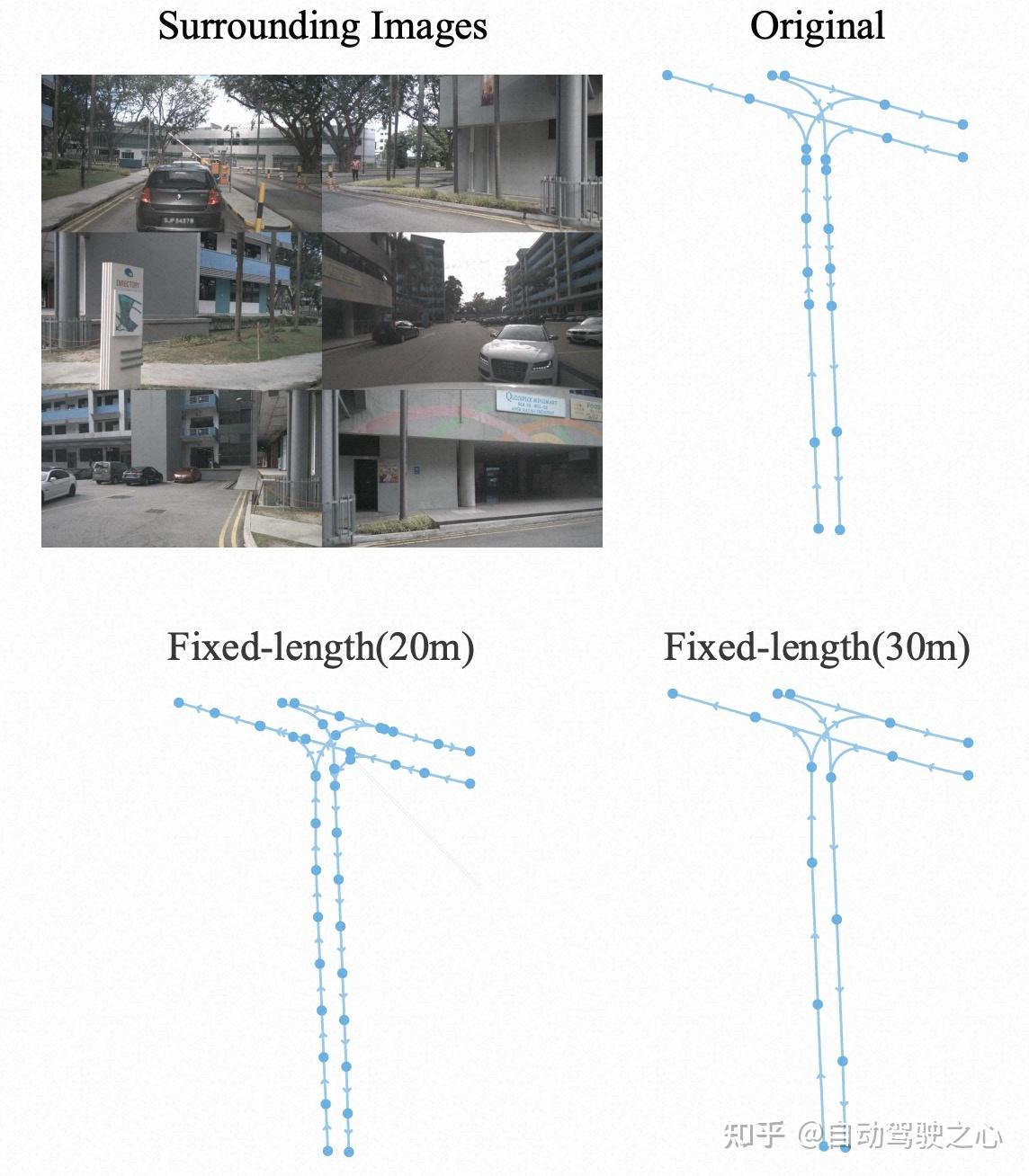
定性分析
可视化结果进一步凸显了SeqGrowGraph的优越性。如下图所示,相较于其他方法(如TopoNet的断连问题、LaneGAP的路径冗余问题),SeqGrowGraph能够生成拓扑连续、结构完整且几何精确的车道图。值得注意的是,我们的方法还能有效合并真实世界地图数据中存在的冗余节点,生成更为简洁和鲁棒的道路网络表示。
总结
本文提出了 SeqGrowGraph,一个用于车道图自回归建模的创新框架。通过将图生成任务重塑为一个增量式的链式扩展过程,SeqGrowGraph不仅在形式上更贴近人类的结构化推理方式,也在技术上有效克服了现有方法在处理复杂拓扑(如闭环)时的固有缺陷。在多个公开数据集上的领先性能验证了该框架的有效性和优越性。我们相信,SeqGrowGraph为自动驾驶领域的在线高精地图构建提供了一个更强大、更可靠的解决方案。
发表回复