
原文链接:https://zhuanlan.zhihu.com/p/1911446740583839135
自动驾驶的最大难题,不是跑得快,而是自动驾驶汽车能不能在各类边缘场景(corner cases)中跑得稳。
像加塞、急刹,碰撞这样的边缘场景在现实中发生概率极低,但一旦发生就可能导致重大事故。如何在这类场景中安全驾驶就成为了自动驾驶落地的“最后一公里”。
与此同时,这类边缘场景数据的稀缺,正在成为制约自动驾驶模型性能提升的关键因素。一方面,这类场景本就罕见,难以获取大规模的训练数据;另一方面,风险高、采集难,也抬高了数据成本。对数据驱动的自动驾驶来说,缺乏这种对应场景的“极限磨练”,在现实道路上“翻车”几乎不可避免。
为此,来自OpenDriveLab、上海交大、浙大、复旦、Zenseact 和广汽研究院的联合团队,提出 Nexus 框架
,通过解耦扩散模型,分块建模局部的噪声演化过程,来模拟这类难、偏、怪的边缘场景,从而提高自动驾驶汽车在这些场景的可靠性。

快和我一起看看他们是怎么做的吧!
什么是Nexus?
Nexus就像一个聪明的“场景生成器”,它能根据预设目标快速构建出包含多车交互、突发变道、急刹、碰撞等交通场景,而且比此前的方法更灵活、更可靠。
此前的做法要么是一次性生成整个视频,但存在生成慢、对目标难以把控的问题;要么是一帧帧预测,虽然快,但却容易出现“场景崩溃”。
Nexus 的创新在于:将场景划分为区块,单独建模每个局部的噪声演化过程,再通过状态间约束将它们串成整体,这样既保证了局部合理,又能全局协同边生成边调整,根据每一帧的新信息动态更新后续内容,确保场景既逼真又可控。
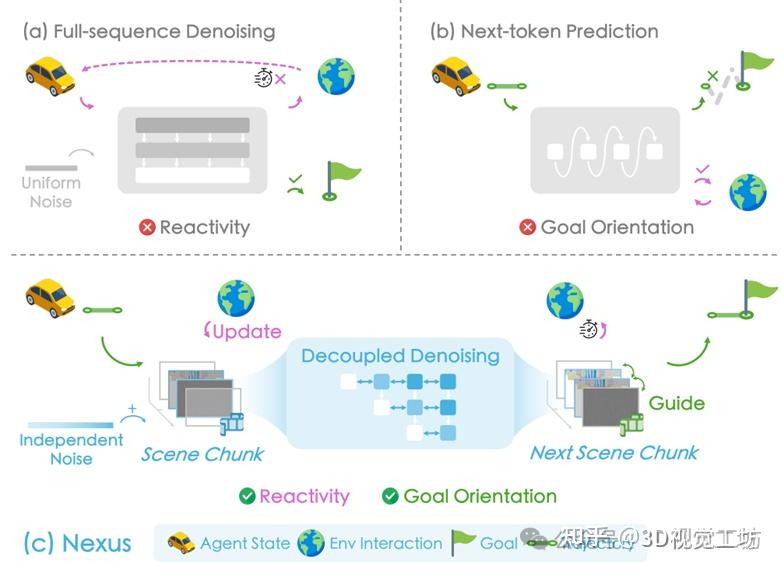
⚙️ 双管齐下:既要实时高效,又要目标可控
Nexus 的设计目标很明确:生成的场景既要满足实时性,又要满足可控性。
- 传统扩散模型在“去噪”时,对全部未来时刻一次性处理,速度又慢,又难以干涉中间过程;
- 自动回归方法虽然能即时更新,却缺乏目标状态的指引。
这两类传统方法导致模型无法兼顾交互性和可控性,而 Nexus 的两大核心创新正解决了这一问题。
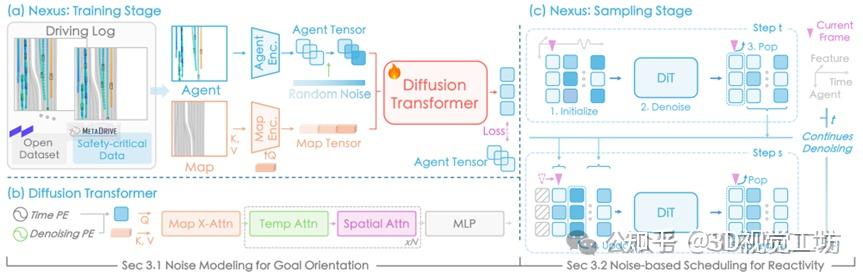
1.噪声状态的“解耦”扩散建模:既快又听话
Nexus 并不是让整个场景一次性扩散,而是将整体场景划分为多个轨迹单元,每个单元在自己的时间轴上独立扩散噪声状态。然后再通过行为规则和逻辑约束,协同各个单元。从而使建模速度大幅提升,且每条轨迹都能精确引导。
2.噪声感知的调度机制:像“动态滑窗”一样顺序生成

Nexus 根据各区块的噪声强度动态决定生成顺序,类似滑动窗口式优化。优先处理“最模糊”的部分,逐步收敛到清晰合理的全局场景。这一做法使得生成时长更短,时序一致性更好,避免局部误差向全局扩散。
Nexus-Data
:540 小时边缘场景库
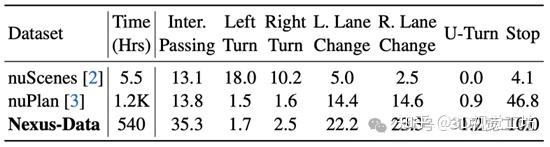

为了在边缘场景中有更好的表现,Nexus 团队还构建了包含数千个高危瞬间、总时长达 540 小时的 Nexus-Data 数据集,覆盖加塞、碰撞、逼停等多种边缘场景,为模型训练提供充分的“极限考验”。
实验效果:大幅降低误差,提升准确率
- 轨迹误差降低 42%,生成的场景更加自然、精准
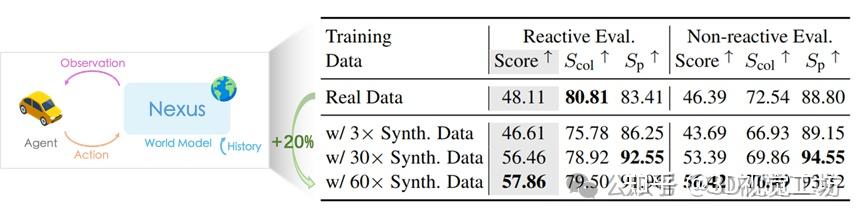
- 生成数据用于训练后,规划准确率提升 20%
- 支持闭环测试、策略学习、仿真评估等实际环节,真正能落地的生成方案
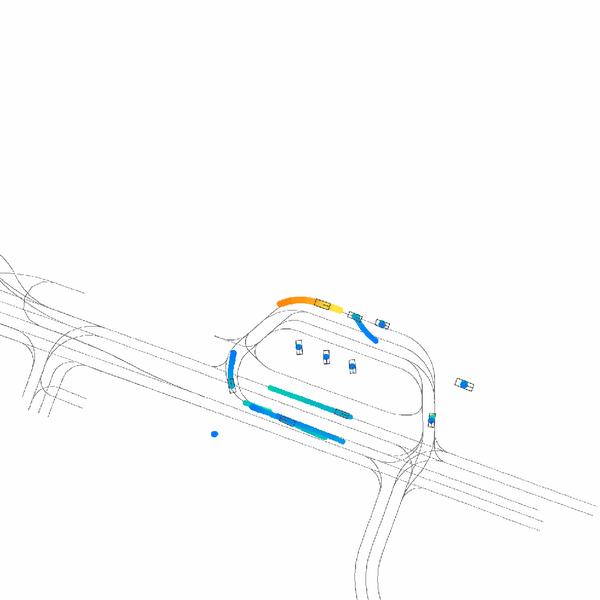
边缘场景生成表现

| 加塞1 | 加塞2 | 追尾1 |
| 边道 | 追尾2 | 看一本机智书 |
| 加塞1 | 加塞2 | 追尾1 |
| 边道 | 追尾2 | 看一本机智书 |
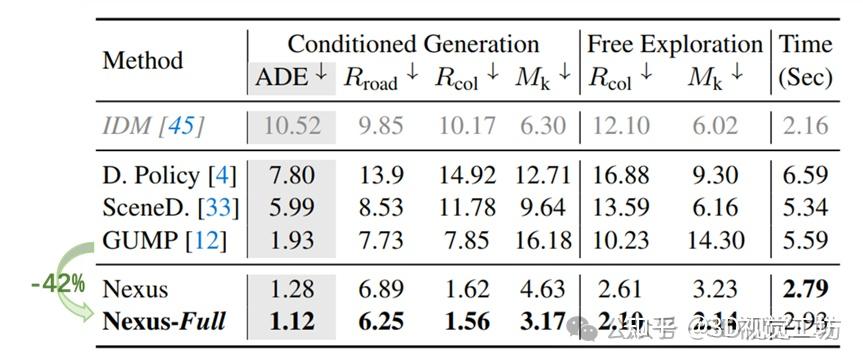
基准测试对比(nuPlan数据集
)
Nexus-Full 在控制精度、安全性、稳定性三个维度均超越已有方法,同时保持合理的推理时间,达到了SOTA.
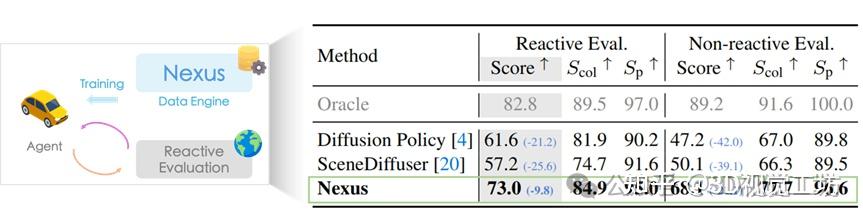
Nexus 支持闭环场景生成,能作为自动驾驶智能体的交互式仿真环境。智能体在生成场景中进行规划,Nexus 则根据其动作实时更新环境,从而实现感知—决策—反馈的闭环。
此外,Nexus 不仅能“生成”,还能作为数据引擎为模型训练提供更多关键场景,提升模型实战表现。
结语
Nexus通过解耦扩散模型突破动态场景生成的技术瓶颈,代码与部分数据集已开源,详情参考OpenDriveLab官网。
发表回复