
前言
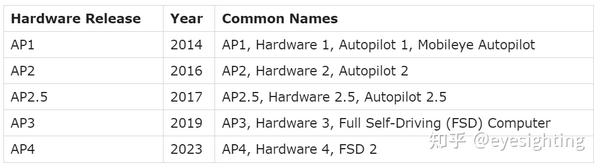
本文总结了Tesla自动驾驶域、信息娱乐域的硬件方案,从HW1.0、HW2.0、HW2.5,到HW3.0,再到HW4.0。可作为自动驾驶计算&域控平台学习、研发的参考资料。
1. Tesla HW
 1.1 HW 4.0
1.1 HW 4.0
性能参数
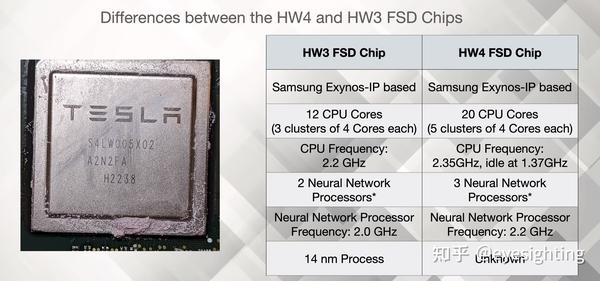
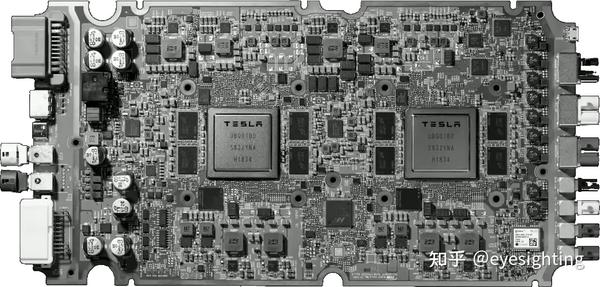
SOC:FSD 2代 * 2;
CPU:三星Exynos IP、CPU频率2.35GHz、闲时1.37GHz、20个CPU、每4个CPU一个集群、5个CPU集群;
AI:3个神经网络 (NN)处理器、NN处理器频率2.2 Ghz,NN可提供50 TOPS的算力;
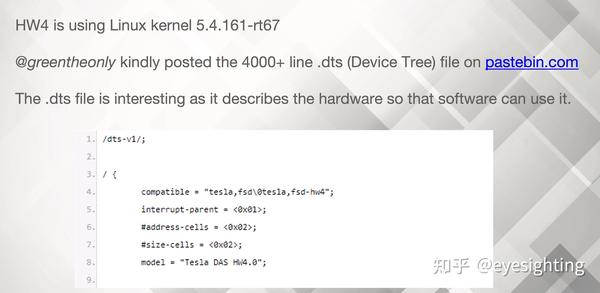
操作系统: Linux内核5.4.161-rt67;
相机:12个,1个备用;
图像传感器:三星;
内存:美光DDRM 16GB * 8;

1.2 HW 3.0
FSD介绍
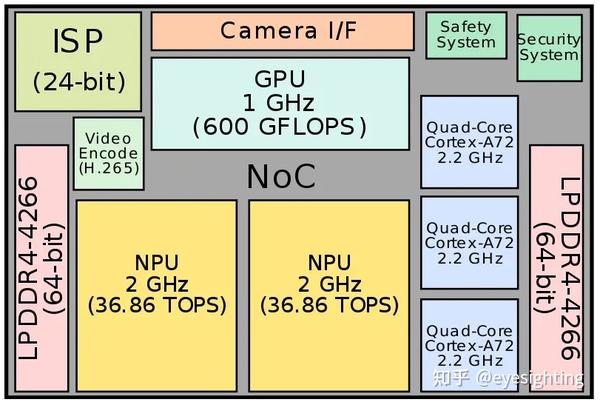
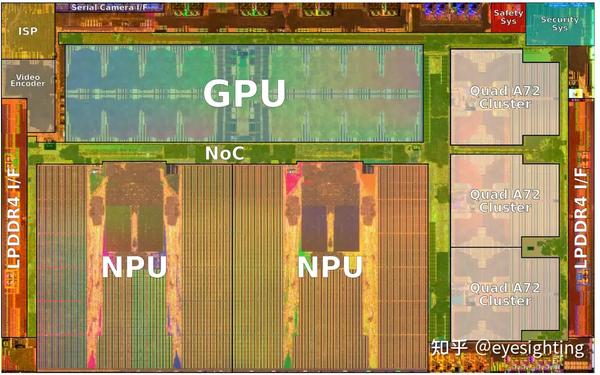
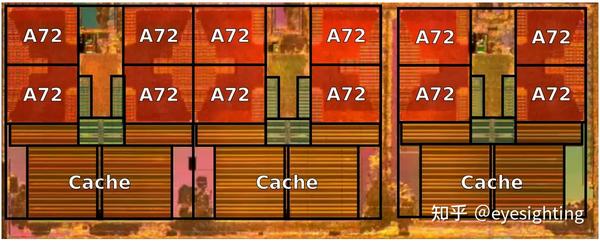
完全自动驾驶芯片(FSD芯片,以前的Autopilot Hardware 3.0)是特斯拉设计的自动驾驶芯片,于2019年初推出用于自己的汽车。特斯拉声称该芯片针对的是4 级和 5 级自动驾驶。FSD 芯片采用三星14 nm 工艺技术制造,包含 3 个四核Cortex-A72集群,总共 12 个运行频率为 2.2 GHz 的 CPU、一个运行频率为 1 GHz 的 Mali G71 MP12 GPU、2 个运行频率为2 GHz 的神经处理单元以及各种其他硬件加速器。FSD 支持高达 128 位 LPDDR4-4266 内存。
性能参数
SOC:FSD 1代 * 2;
CPU:3个四核Cortex-A72集群、总共12个CPU、运行频率为2.2GHz;
AI:2颗神经网络加速器,可提供36 TOPS的算力,三星14 nm工艺;
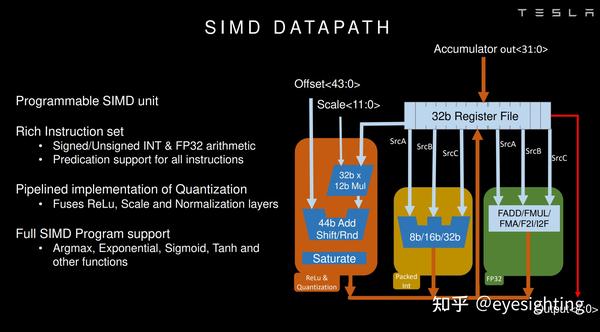
神经网络处单元
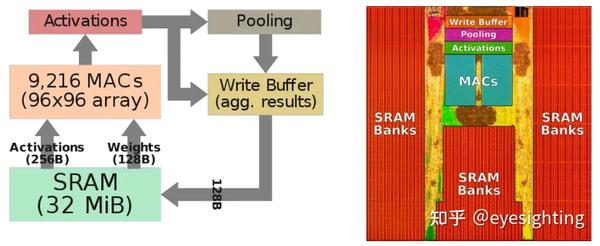
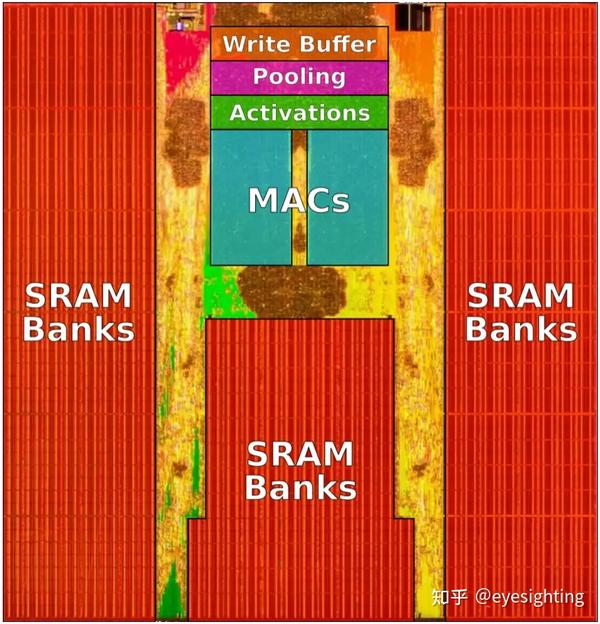
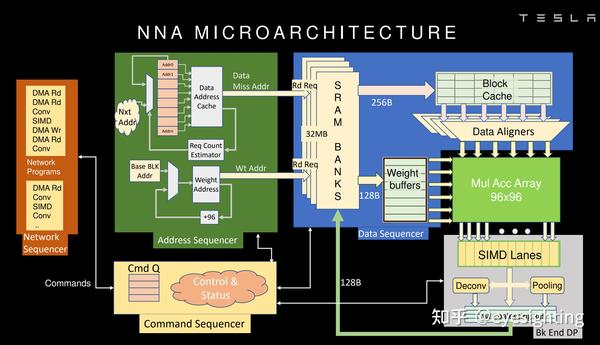
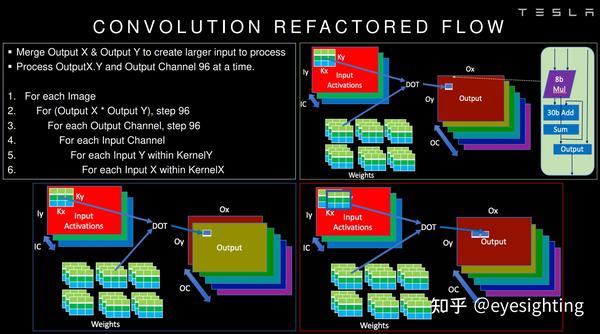
FSD 芯片集成了两个定制设计的神经网络处理单元。每个 NPU 均包含 32 MiB SRAM,专为存储临时网络结果而设计,从而减少向主内存的数据移动。整体设计非常简单。每个周期,256 字节的激活数据和额外的 128 字节的权重数据从 SRAM 读取到 MAC 阵列中,并在其中进行组合。每个 NPU 都有一个 96×96乘法累加器阵列总共 9,216 个 MAC 和 18,432 个操作。对于 FSD 芯片,Tesla 使用 8 位乘 8 位整数乘法和 32 位整数加法。这两种数据类型的选择很大程度上是为了降低功耗(例如,32 位 FP 加法的功耗大约是 32 位整数加法的 9 倍)。在 2 GHz 下运行,每个 NPU 的峰值性能为每秒 36.86 万亿次操作 (TOPS)。FSD 芯片的每个芯片上有两个 NPU,综合峰值性能每秒可执行高达 73.7 万亿次操作。在点积运算之后,数据被转移到激活硬件、池硬件,最后进入聚合结果的写入缓冲区。FSD 支持多种激活函数,包括修正线性单元(ReLU)、Sigmoid 线性单元(SiLU) 和 TanH。每个周期,128字节的结果数据被写回SRAM。所有操作都是同时连续完成的,重复进行直到整个网络完成。
图像信号处理器
FSD 将图像信号处理器 (ISP) 与内部 24 位管道相结合,旨在处理 Tesla 汽车上配备的 8 个 HDR 传感器,每秒能够处理高达 10 亿个像素。ISP 具有色调映射功能,允许芯片暴露由于亮点/暗点(例如阴影)而产生的额外细节。此外,ISP 还具有降噪功能。
1.3 HW 2.5
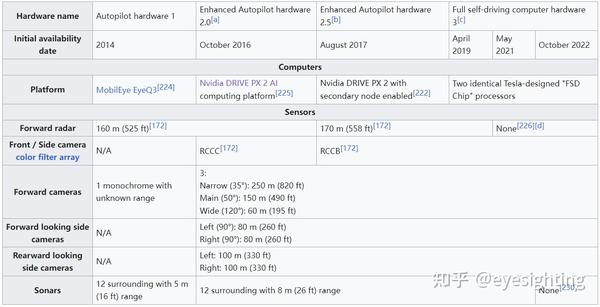
AP2.5 的硬件将于2017 年 8 月左右至 2019 年 4 月左右安装在 Model S、X 和 Model 3 车辆上。该硬件也是由Nvidia公司开发的,是在AP2的基础上进一步开发的。与 AP2 的区别在于更多的计算机能力、额外的冗余布线、不同的前置雷达和更好的摄像头。AP2.5并不是全新的设计,而是AP2的优化。AP2.5硬件使用带RCCB的摄像头。8个滤镜,而AP2仍然使用带有RCCC滤镜的相机。
性能参数
SOC:NVIDIA Drive PX2;
Camera:8颗摄像头;
Radar:1颗前置毫米波雷达/大陆;
USR:12颗远程超声波传感器;
功能:行车记录仪、哨兵模式
Nvidia Drive PX 2 基于一两个Tegra X2 SoC,其中每个 SoC 包含 2 个 Denver 内核、4 个 ARM A57 内核和一个 Pascal一代GPU 。
1.4 HW 2.0
AP2 的硬件已于2016 年 10 月至 2017 年 8 月左右安装在 Model S 和 X 车辆中。该硬件由 Nvidia 公司开发。与AP1相比,AP2的计算单元的计算能力是其前身的40倍。这个硬件版本的自动驾驶仪有 8 个带有 RCCC 滤色镜的摄像头,可以显示车辆周围的 360 度视图。改进的超声波传感器和前面的雷达补充了摄像机图像中的信息。配备 AP2 硬件的 Model 3 车辆并不存在,因为特斯拉在 Model 3 开始生产之前就开始在其新车中仅安装 AP2.5 硬件。因此,所有 Model 3 车辆都至少配备 AP2.5。
性能参数
SOC:Drive PX2;
Camera:8颗摄像头;
Radar:1颗前置毫米波雷达/博世;
USR:12颗远程超声波传感器;

1.5 HW 1.0
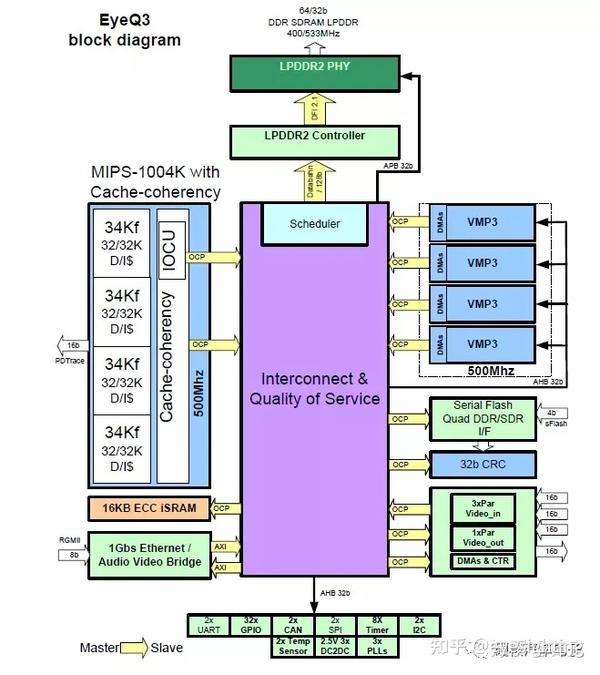
AP1的硬件于2014年10月至2016年10月安装在Model S和X车辆中。由MobilEye公司在EyeQ3系统下开发的。该硬件基于黑白前置摄像头、超声波传感器和前置雷达。由于缺乏全方位可视性,摄像机不可避免地无法实现360°视角。使用这种硬件永远不可能实现完全自动驾驶。AP1 是迄今为止特斯拉车辆中唯一具有交通标志识别功能的自动驾驶仪。随后在配备 AP1 硬件的车辆中激活此自动驾驶选项的费用为 3100 欧元。
性能参数
SOC:EyeQ3 * 1;
Camera:单颗EQ3系列摄像头;
Radar:单颗毫米波雷达;
USR:12个中程超声波雷达;
2. Tesla IVI
Tesla信息娱乐系统/座舱芯片发展历程:

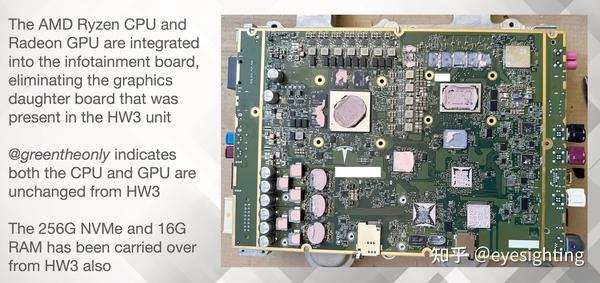
2.1 IVI 3.0
Tesla第三代座舱SOC基于AMD的Ryzen CPU和Redaon GPU。
CPU:AMD Ryzen
GPU:AMD Redeon
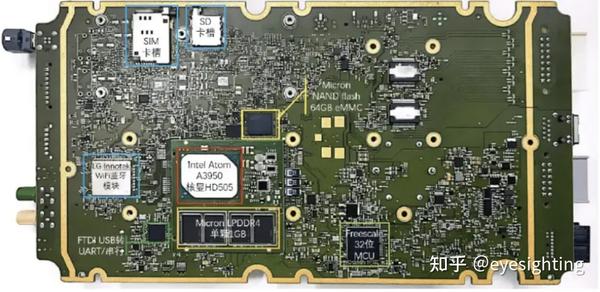
2.2 IVI 2.0
Tesla第二代座舱芯片基于Intel的A3950处理器。

2.3 IVI 1.0
Tesla第一代座舱芯片基于NVIDIA的Tegra3处理器。
NVIDIA 的 Tegra 3(代号“ Kal-El ”)在功能上是一款带有四核ARM Cortex-A9 MPCore CPU 的 SoC,但在 Nvidia 所称的“可变SMP架构”中包含第五个“配套”核心。虽然所有内核均为 Cortex-A9,但配套内核采用低功耗硅工艺制造。该内核对应用程序透明地运行,用于在处理负载最小时降低功耗。在这些情况下,CPU 的主要四核部分会关闭。 Tegra 3 是第一个支持 ARM SIMD 扩展NEON的 Tegra 版本。 Tegra 3 中的 GPU 是 Tegra 2 GPU 的演变,具有 4 个额外的像素着色器单元和更高的时钟频率。它还可以输出高达 2560×1600 分辨率的视频,并支持1080p MPEG-4 AVC/h.264 40 Mbit/s High-Profile、VC1-AP 以及更简单形式的 MPEG-4(例如 DivX 和 Xvid)。
总结
Tesla自动驾驶软硬件方案一直都在行业领先位置。
HW5.0也快要发布了。
发表回复