
在我们最受欢迎的未剪辑版自动驾驶汽车视频中,一辆自动驾驶汽车(AV)承担了穿行耶路撒冷的任务,这是对任何驾驶员(不管是人类还是其他自动驾驶系统)来说都极具挑战性的城市驾驶任务之一。
耶路撒冷是一座拥有5000年历史的迷宫式城市,其现代道路由未经规划的古道演变而来。其交通情况难以预测,充满挑战性,具有与现代城市整齐规划的街道完全不同的驾驶体验。
我们既可以欣赏,又能在如此复杂的环境下检验自动驾驶的技术,这是多么巨大的成就。
自动驾驶汽车的“大脑”
“一辆自动驾驶汽车必须准确无误地运行,同时能够避让障碍物和其他道路使用者。为此,它需要一个非常聪明的大脑” Mobileye首席技术官Shai Shalev-Shwartz教授解释道。
在自动驾驶汽车中,“聪明的大脑”由依托强大的微处理器运行的软件组成,称为“自动驾驶堆栈”,是自动驾驶汽车能够成功并自然地完成无保护左转,以及轻微转向避让打开的车门等精细动作的原因。
就像人类的大脑一样,我们也可以把自动驾驶汽车的大脑分为以下功能层:
– Sensing 感应层
– Perception 感知层
– Localization 定位层
– Planning 规划层
– Control 控制层
自动驾驶汽车如何感应
 从摄像头开始
从摄像头开始
自动驾驶汽车的感应层由各种可以作为车辆“眼睛”的传感器构成,其中使用的主要传感器(摄像头)无疑是与人类驾驶员的眼睛最为相似的。
这些不同分辨率、尺寸和角度的摄像头通常安装在挡风玻璃、保险杠和后视镜附近,通过协同作业就能够获取到车外360°的环绕视图。
与其他传感器相比,摄像头在检测颜色和形状方面更加强大,因此适合检测车道线、路标、其他车辆,以及驾驶环境周围的各种其他物体。
让精确性进一步提高
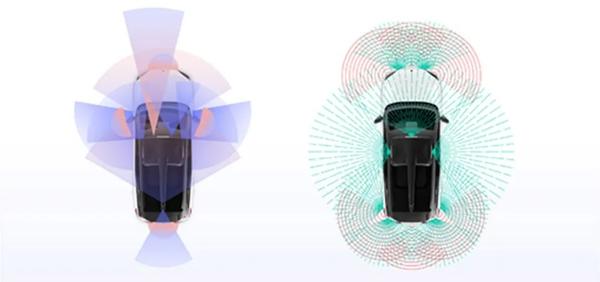
当然,摄像头也有局限性–特别是在光线不足或天气恶劣的条件下。因此自动驾驶汽车中除了摄像头还要辅以雷达和激光雷达等其他传感器的输入,以提供更全面的车辆周围环境视图。
与摄像头传感器相比,雷达在雨、雪、雾等低能见度条件下依然能够可靠地运行。然而,雷达并不能够像摄像头那样描绘物体的精确形状。
激光雷达(Lidar)是“光线检测和测距”的缩写,是一种与雷达类似的技术,但与雷达使用无线电波不同,激光雷达使用的是激光脉冲来测量距离并创建三维地图。
数据汇集
 汇集来自所有传感器(摄像头、雷达和激光雷达)的输入,并创建世界环境图像的过程称为“传感器融合”。
汇集来自所有传感器(摄像头、雷达和激光雷达)的输入,并创建世界环境图像的过程称为“传感器融合”。
传感器融合主要分为两类,即前期传感器融合和后期传感器融合,区别在于汇集各种传感器数据的具体时间点:
● 在前期传感器融合中,原始数据融合先于目标物检测算法;
● 在后期传感器融合中,在融合生成3D地图之前,会对数据应用目标物检测算法。
虽然业内普遍采用前期传感器融合,但Mobileye的自动驾驶系统独树一帜,使用了后期传感器融合。
我们还采用了传感器冗余来创建独立的道路环境模型,如果一个系统发生了故障,那么另一个系统也可以提供驾驶汽车所需的感知信息备份。
让一切变得有意义
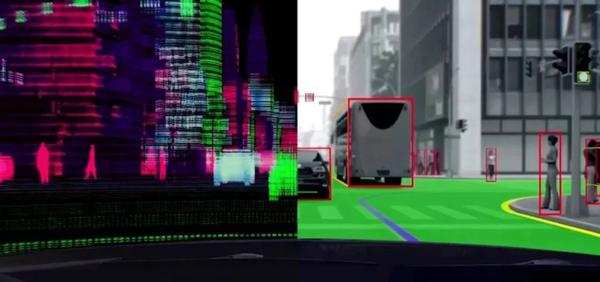
接收到传感器数据后,汽车的车载计算机需要对这些数据进行解读:这个物体是广告牌还是卡车?道路的边缘在哪里?
人工智能的一个重要子领域,即计算机视觉,专为这项任务而生。二十多年来,计算机视觉也一直是Mobileye的主要关注领域之一。
计算机视觉算法包括目标物识别、模式识别、聚类算法等,将其应用于数据后,汽车能够检测到车道线、路标、信号灯以及环境中的其他物体。
我们甚至开发了特定算法来检测车门是否打开和交警使用的手势等等。

地图上精确定位
定位是自动驾驶堆栈的另一个基本层,是确定车辆相对于周围环境的精确位置的过程,这对于确保汽车做出明智的驾驶决策,以及制定行车路线至关重要。
虽然GPS通常可用于初始定位,但其在准确性方面仍具有局限性,特别是在城市环境中,高大的建筑物会干扰卫星信号,而安全问题是至关重要的,因此定位必须精确到厘米,惯性传感器、摄像头、激光雷达和雷达可以提供更精确的位置信息。
定位时,高精地图是另一个重要组成部分,因为地图包含道路静态特征的准确信息,比如路沿和人行横道的位置,能够使车辆更准确地确定其相对于道路的位置,并“填补”可能缺漏的传感器数据。
获得准确的道路环境地图后,自动驾驶汽车就会使用各种算法来确定其确切的位置和方向。为了计算车辆的精确位置,算法需要考虑,诸如汽车速度、转向角以及其他传感器读数等因素。

Mobileye的地图技术,即路网信息管理™(或称REM™),并没有使用静态高精地图,而是使用了来自世界各地的匿名众包数据,因此生成的地图更加动态,数据更新也更加及时。
Mobileye REM技术生成的地图提供了丰富的地图语义。这意味着我们的地图技术比大多数地图技术更进一步,能捕捉到驾驶员如何使用道路和周围环境的信息。
例如,使用REM后,车辆不仅能够感知信号灯,还能“知道”这个信号灯与哪条车道(或哪几条车道)相关。
自动驾驶的规划层
假设你是一辆自动驾驶汽车,你知道世界是什么样子,知道自己在哪里,知道自己已经走了多长的路。现在,你只需根据这个世界模型做出决策,并制定一个计划到达目的地即可,而这就是下一层自动驾驶堆栈的作用所在。
在规划行程时,自动驾驶汽车需要规划从A点到B点的路线。然而,在自动驾驶汽车中,规划层包含许多类型的规划,如运动规划、决策、防撞和行为规划。
举个例子,防撞算法可以确保车辆避让路上的移动物体和静态物体,以保证所有人的安全;规划层的其他算法还可以确保乘客认为整个行程是安全且舒适的(没有突然加速或制动),并确保汽车按照交通法规行驶。
运动规划算法可以对变道和并线等机动动作做出决策;行为规划则负责计算路上物体可能的行为。
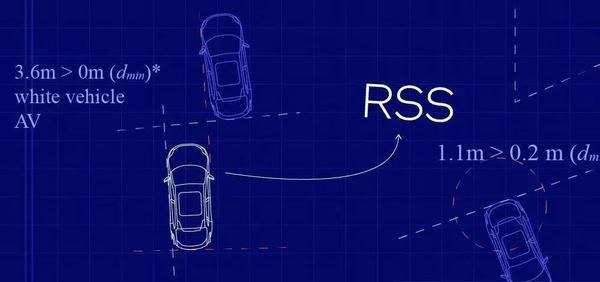
在规划层中,Mobileye还通过责任敏感安全模型™(或称RSS™)增加额外的安全保护。RSS是我们保证自动驾驶汽车安全的开放数学模型,也是我们驾驶策略的基础,能够基于透明且可验证的规则来实现谨慎而自信的驾驶。
车辆控制
车辆的计算机根据传感器信息、感知和规划确定如何安全移动后,就需要以人类驾驶员的方式来控制车辆。
就像人脑控制四肢运动来探索世界一样,自动驾驶汽车的计算机也需要控制刹车、方向盘、油门和其他部件。

从传感器、算法到众包地图和行为规划,自动驾驶汽车已经取得了长足的进步。
想象一下,在未来,道路事故将不复存在,驾驶时间将转化为生产力、休闲娱乐和家庭时间。在Mobileye,这一愿景正在逐步变成现实,我们对移动出行的未来感到无比兴奋。
发表回复