
缩略语:
C-V2X:Cellular-V2X蜂窝车联网
LTE: Long Term Evolution长期演进技术
LTE-V2X:LTEVehicleto Everything基于LTE的车用无线通信技术
MaaS:Mobilityas a Service 出行即服务
MCU:Microcontroller Unit 微控制单元
MEC:Multi-access Edge Computing多接入边缘计算
NR-V2X:newradioV2X基于5G新空口的车联网通信
NV:NormalVehicle未装载通信系统的普通车辆
OBU:On-BoardUnit车载单元
OTA:Over-the-Air Technology空中下载技术
RSCU:Road Side Computing Unit路侧计算单元
RSl:Road Sidelnformation 路侧信息
RSM:Road SafetyMessage 路侧安全消息
RSU:Road Side Unit 路侧单元
V2l:Vehicle tolnfrastructure 车载设备与路侧基础设施通信
V2N:Vehicle to Network 车与网络通信
V2P:Vehicle to Pedestrians 车载单元与行人设备通信
V2V:Vehicle to Vehicle 车与车通信
V2X:Vehicle to Everything车联网
VICAD:Vehiclelnfrastructure Cooperated Autonomous Driving车路协同自动驾驶
参考资料:
[1] 清华大学智能产业研究院、百度Apollo,《面向自动驾驶的车路协同关键技术与展望2.0》,2023
[2] 希迪智驾官网:希迪智驾 (cidi.cn)
[3] 蘑菇车联:蘑菇车联 | 自动驾驶全栈技术与运营服务提供商 (mogoauto.cn),遮蔽车端全部传感器仅靠路端蘑菇基站实现L4级自动驾驶
[4] 中智行:https://www.allride.ai/
[5] 腾讯智慧交通:WeTransport腾讯智慧交通 (tencent.com)
[6] 滴滴智慧交通:智慧交通 (didiglobal.com)
[7] 斑马智行:斑马网络官网|斑马智行互联系统_互联网汽车_智慧出行 (ebanma.com)
清华大学智能产业研究院、百度Apollo白皮书链接:白皮书2.0-20230530 (bcebos.com)
腾讯智慧交通白皮书:https://wt-whitepaper-1258344699.file.myqcloud.com/腾讯未来交通白皮书2.0.pdf
一、是什么?
Ⅰ、什么是车路协同自动驾驶(VICAD)?
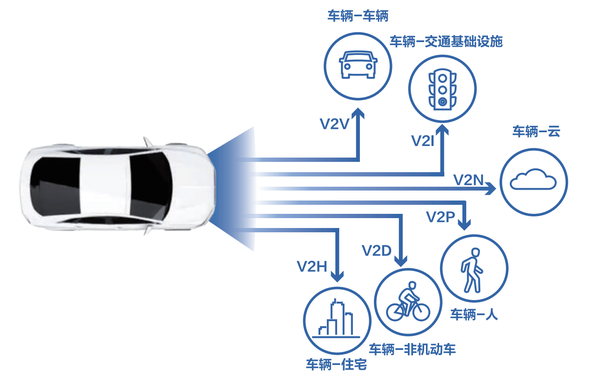
Vehicle Infrastructure Cooperated Autonomous Driving,即车路协同自动驾驶。车路协同自动驾驶是在单车智能自动驾驶的基础上,借助C-V2X和4G/5G通信技术,将“人-车路-云”交通要素有机地联系在一起,实现车与车(V2V)、车与道路(V2I,主要指道路各类系统和设备设施,如感知设施、气象检测器、状态监测设备、交通诱导与控制设施等)、车与云(V2N,地图平台、交管平台、出行服务平台等)和车与人(V2P)等的全方位协同配合(如协同感知、协同决策规划、协同控制等),从而满足不同等级自动驾驶车辆应用需求(如辅助驾驶、高等级自动驾驶)实现自动驾驶单车最优化和交通全局最优化发展目标。
下图示意说明了自动驾驶车辆与不同交通要素间的协同关系,实现“交通场景万物互联”。
 VICAD中的“V”是Vehicle,包括不同网联等级和自动化程度的车辆,“I”则是Infrastructure,一般代指路端智能基础设施及环境,包括但不限于
VICAD中的“V”是Vehicle,包括不同网联等级和自动化程度的车辆,“I”则是Infrastructure,一般代指路端智能基础设施及环境,包括但不限于
1、道路工程及配套附属设施(路面、道路标志标识、信号灯、照明、供电等设施);
2、智能感知设施(摄像头、毫米波雷达、激光雷达等);
3、车路通信设施(直连无线通信设施、蜂窝移动通信设施);
4、计算控制设施(路侧边缘计算节点、多接入边缘云或各级云服务平台)
5、高精度地图与辅助定位设施:
6、其他配套附属设备设施(如供能、照明设施)
7、道路上承载的各类人员(如行人、施工人员、非机动车驾驶员等)。
Ⅱ、什么是边缘计算?
参考资料:什么是边缘计算?一文读尽秒懂 – 知乎 (zhihu.com)
(一)边缘计算与云计算
边缘计算是为应用开发者和服务提供商在网络的边缘侧提供云服务和IT环境服务;目标是在靠近数据输入或用户的地方提供计算、存储和网络带宽
云计算能够处理大量信息,并可以存储短长期的数据,这一点非常类似于我们的大脑。大脑是中枢神经中最大和最复杂的结构,也是最高部位,是调节机体功能的器官,也是意识、精神、语言、学习、记忆和智能等高级神经活动的物质基础。人类大脑的灰质层,富含着数以亿计的神经细胞,构成了智能的基础。而具有灰质层的并不只有大脑,人类的脊髓也含有灰质层,并具有简单中枢神经系统,能够负责来自四肢和躯干的反射动作,及传送脑与外周之间的神经信息。我们在初中的生物中都学习到了膝跳反应,这就是脊髓反应能力的证据。边缘计算对于云计算,就好比脊髓对于大脑,边缘计算反应速度快,无需云计算支持,但低智能程度较低,不能够适应复杂信息的处理。
(二)边缘计算优点
低延迟: 计算能力部署在设备侧附近,设备请求实时响应
低带宽运行:将工作迁移至更接近于用户或是数据采集终端的能力能够降低站点带宽限制所带来的影响。尤其是当边缘节点服务减少了向中枢发送大量数据处理的请求时。
隐私保护:数据本地采集,本地分析,本地处理,有效减少了数据暴露在公共网络的机会,保护了数据隐私。
Ⅲ、车路协同整体架构
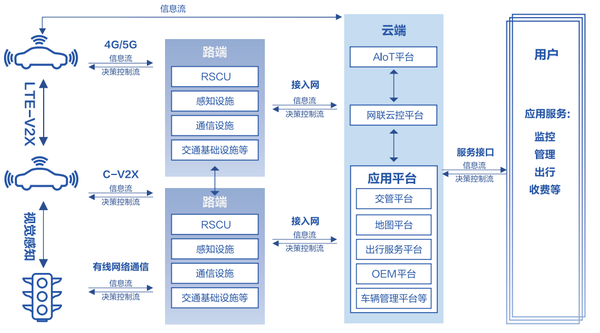
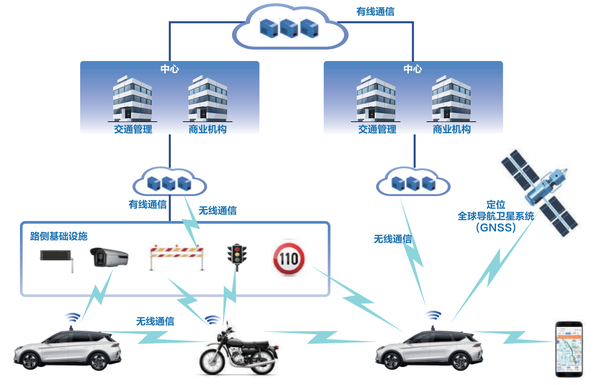
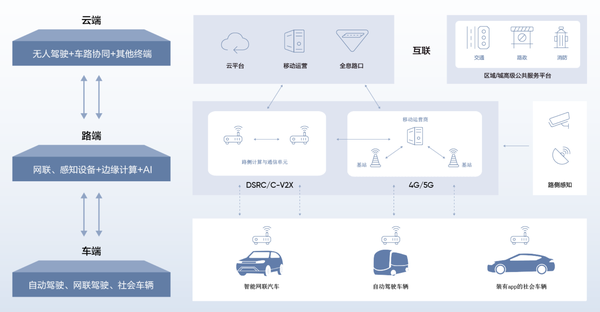
高等级智能道路系统总体架构下图,从物理分布角度看,由车端、路端和云端三部分组成。
通信:车与车之间通过LTE-V2X通信;车与路之间通过4G/5G或者C-V2X通信;路与云之间可实现有线/无线两种通信方式;最后,车与云之间可通过4G/5G通信。各种通信技术打通“车-路-云”信息交互通道,实现关键信息传输。
路端(边缘计算):在C-V2X车路云高效通信的基础上,以人工智能和边缘计算应用为核心的路端感知技术,可以发挥路端视角好、观测时间长、易部署等优势,解决AV遮挡、盲区、不利照明、极端天气相关感知长尾问题,扩展AV的感知范围,提升AV的感知能力,进而保障车辆安全高效行驶。
 Ⅳ、智路OS
Ⅳ、智路OS
智路OS以开源开放为首要前提,由系统软件平台和功能软件平台共同构成了完整的操作系统布局,为行业提供了统一的车路协同开发环境。其中,系统软件平台自下而上分别由内核层、硬件抽象层、中间件层三部分组成,面向智能网联、高级别自动驾驶和交通数字化管理等全场景,构建起统一的数据和技术底座,以打破应用生态孤岛,支撑起丰富的上层应用。得益于整体架构设计,智路OS在技术上实现了协同性、高性能、智能化、开放性、兼容性、安全性六大特性。

二、为什么?
车路协同自动驾驶的意义
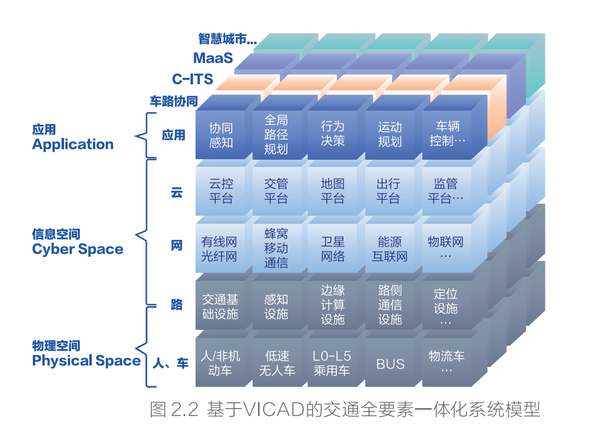
(1)交通全要素的一体化
车路协同系统中的交通参与者、交通运输工具、交通基础设施和交通环境不再只被看作一个简单的对象,人、车、路和环境所对应的交通要素通过传感器的采集和融合处理,成为具有自主身份且可具备信息交互功能的数字李生体。物理实体和数字李生体之间可以通过有效信息流和决策控制流完成信息传递和决策控制闭环,例如车辆的远程操控、道路信号灯的优化控制、道路可变标识控制等:不同物理实体之间,在车路协同这个复杂信息物理系统的全局调度下,呈现出更加高效、更加秩序化的交通运行态势
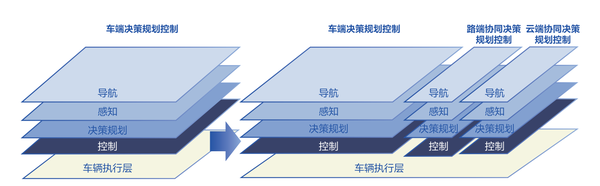
(2)自动驾驶计算、感知、决策、控制的一体化
通过VICAD可以充分发挥路端和云端算力充裕、易部署调度等优势,对车端感知能力和算力进行有效分担,突破单车算力极限,实现全系统算力的合理分布分配和优化均衡。
(3)数据驱动的自动驾驶、智能交通跨行业应用一体化
车路协同系统的核心目标是利用一套车路云基础设施与基础能力体系,通过数据驱动同时赋能自动驾驶、智能交通,甚至共享出行、智慧城市等更多行业,支持不断迭代和创新发展。传统交通系统和车辆中大量的数据都是隐性存在的,没有被充分利用和挖掘出其背后潜在的价值。车路协同系统通过构建数据层面“状态感知、实时分析、科学决策、精准执行”自由流动的闭环赋能体系,能够将数据源源不断地从物理空间中的隐性形态转化为信息空间的显性形态,并不断迭代优化。数据是车路协同系统的基础和灵魂,贯穿了状态感知、实时分析、科学决策、精准执行的全流程,数据在自动生成、自动传输、自动分析、自动执行以及不断选代优化过程中不断积累、螺旋上升,不断产生更为优化的数据,能够通过聚变引起质变。
三、怎么做?
车路协同自动驾驶怎么实现?
在白皮书中,车路系统自动驾驶发展分为三个阶段(打地基、承重墙、盖房子):
打地基:阶段1信息交互协同是重要基础,为各类车路协同应用提供互联互通保障支持;
承重墙:阶段2协同感知是关键核心,实现自动驾驶感知互补、强化与元余;
盖房子:阶段3协同决策控制是最终目标,实现自动驾驶微观决策控制与智能交通宏观决策控制兼容统一。

四、百度Apollo车路协同自动驾驶发展现状与趋势
Ⅰ、VICAD基础支撑技术
1、高可靠、低时延通信技术:包括无线通信和有线传输,其中无线通信又可分为直连无线通信(如LTE-V2X PC5、NR-V2X PC5等)和蜂窝移动通信(包括4G、5G,以及未来演进的6G)两类有线传输则包括CAN、车载以太网、光纤网络等
2、2D/3D高精度融合感知技术: 包括传感器离线/在线高精度标定技术、多传感器融合技术、交通事件感知认知技术、交通参与者行为预测技术、交通运行状况检测与预测技术等
3、高精度地图与高精度定位技术:包括高精度地图动态更新技术、路侧辅助定位技术等
4、车路协同决策与协同控制技术: 包括自动驾驶意图预测、博弈仲裁、引导调度等协同决策规划车辆、设施、人等多目标协同控制技术
5、高性能云计算技术:包括高性能边缘计算技术、多级云控平台技术、大数据和人工智能平台技术、算网一体智能调度技术
6、多级纵深安全技术:如自动驾驶功能安全与预期功能安全信息安全技术(包括数据安全、网络安全技术、地理信息安全等),安全统一认证技术、安全态势感知技术、安全主动防御技术等
Ⅱ、车路协同感知已进入规模化建设部署应用阶段
目前,国内外VICAD第1发展阶段已经开展了大规模测试验证与示范应用,第2发展阶段车路协同感知也已完成了理论研究、技术验证和标准制定,正在加速走向规模化建设部署与应用,主要体现在以下三个方面:
1、协同感知类场景是国内外V2X研究的重点内容
美国、欧洲和我国车路协同相关标准中都重点针对车路协同感知规划了大量的应用场景。
2、车路协同感知技术和能力得到了极大提升
针对L2级别:实现交通事件、红绿灯协同感知,进一步实现优先通行、绿波通行等复杂度较高应用;
高等级自动驾驶:仅靠路端感知能力实现L4等级自动驾驶闭环运行
3、车路协同感知已在重点城市实现行政区级别建设部署应用
Ⅲ、车路协同决策控制存在现实需求
1、在协同感知基础上进一步解决自动驾驶安全性与ODD问题
根据自动驾驶预期功能安全(Safety Of The lntended Functionality,SOTIF)理论,提升自动驾驶安全性有两种方式,一种是将SOTIF“未知”场景转化为“已知”场景,另一种是将“不安全”场景转化为“安全”场景。车路协同感知通过多源感知渠道为CAV提供更加丰富、精确的感知信息,提升车辆的感知能力,可以实现将SOTIF“未知”场景转化为“已知”场景,但是在将“不安全”场景转化为“安全”场景方面,却存在一定的局限性,需要通过决策规划和控制进一步解决。在ODD方面,协同感知只能解决自动驾驶车辆部分ODD限制,需要从全局高度进行车路云协后感知和决策控制,进行ODD动态管理,合理扩展自动驾驶ODD。
2、解决混行状态下自动驾驶与非自动驾驶的冲突博弈问题
自动驾驶车辆是交通系统的组成部分之一,现阶段道路上还有大量的非自动驾驶、较低等级自动驾驶车辆、非机动车辆和行人,以及大量的违法违章驾驶行为,因此迫切需要解决混行交通模式下局部或全局的车辆最优化问题,在保障交通安全和交通效率的前提下,实现分布式智能和群体智能,最终达成全局最优化智能交通发展目标。
3、解决动驾驶“无人”问题
自动驾驶车辆在有驾驶员或安全员作为安全保障措施时,遇到复杂或极端场景情况时,可通过人工接管控制车辆通过极端场景,但当L4车辆完全去掉车端主驾或副驾安全员时,仅靠单车能力还有一定概率无法顺利通过复杂极端场景,需要借助路端和云端能力,为车辆提供全方位协同感知、决策规划和控制服务,帮助车辆安全通过复杂极端场景,全方位保障无人驾驶的安全性和普及应用。
4、解决交通环境秩序化和最优化问题
通过车路协同,能够支持开展更加复杂、更深层次、更大范围、更加多样的车路协同应用服务,满足跨行业、跨领域、跨地域交通出行需求,解决区域级移动多接入、多层次互操作和协同、大规模高密度实施控制、高可靠低时延计算决策等协同控制等一系列关键问题,实现从个体最优向群体智能最优化和全局智能最优化发展,这是对智能交通本质性的变革和突破。
五、希迪智驾车路协同
(一)整体架构
(二)部署方案
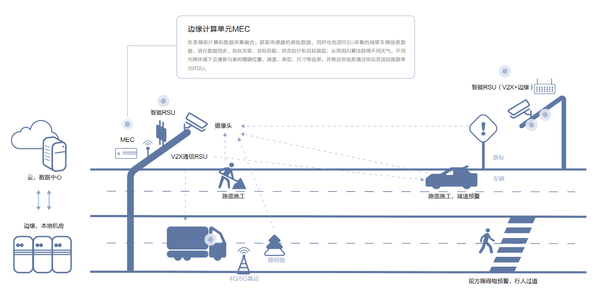
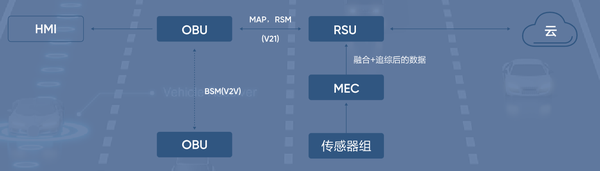
边缘计算单元MEC
负责辅助计算和数据采集融合。获取传感器的原始数据,同时也包括RSU采集的网联车辆信息数据,进行数据同步、目标关联、目标匹配、状态估计和目标跟踪,从而用AI算法获得不同天气、不同光照环境下交通参与者的精确位置、速度、类型、尺寸等信息,并将这些信息通过协议发送给路测单元RSU。
(三)车路协同协议栈
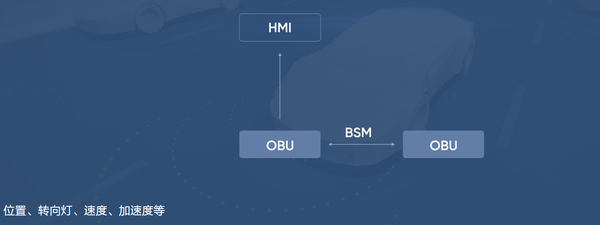
(1)车与车通信
OBU(车载单元)与OBU通信交换BSM(基础安全消息)
功能:前向碰撞预警、盲区预警/变道辅助、紧急制动预警 、异常车辆提醒、车辆失控预警、紧急车辆提醒、交叉路口碰撞预警、左转辅助
(2)车与路通信以及边缘计算
OBU(车载单元)与RSU(路侧单元)交换RSM信息(路侧安全消息)
交叉路口碰撞预警、左转辅助、道路危险状况提示、弱势交通参与者碰撞预警
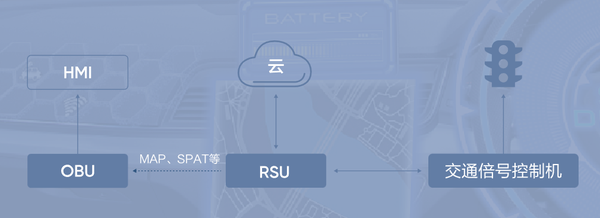
(3)车与路以及信号灯的交互
OBU(车载单元)与RSU(路侧单元)交换SPAT信息(信号灯相位与时序消息)
闯红灯预警、左转辅助、道路危险状况提示、绿波车速引导、特殊车辆优先通行
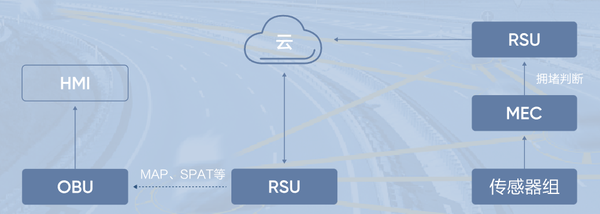
(4)车与路、路与路的通信以及边缘计算
精确的前方拥堵提醒
六、腾讯智慧交通
以数字化、⽹络化和智能化为牵引,以数据为关键要素和核⼼驱动,推进物理和虚拟空间的交通运输活动融合交互。通过数字孪⽣等技术,打造未来交通⽣命体,助⼒政府管理者通过数字化治理提升服务能⼒;服务交通企业的数字化转型,释放数据价值,实现降本增效;协同交通合作伙伴打造数字创新⽣态,实现价值创新;让交通参与者享受数字交通带来的便捷⾼效、优质公平、智慧绿⾊的交通服务,不断增强⽤户的获得感、幸福感和安全感。
 交通OS:数字交通基础设施和行业应用生态的连接器
交通OS:数字交通基础设施和行业应用生态的连接器

实时数字孪生,贯穿感知、计算、仿真推演到服务的全链路体系

C端触达,面向全交通领域的更广泛的用户触达

3大能力:全天候融合感知,全息数字底座,实时时空计算

发表回复