
上一节的参考线模块提供了光滑的frenet坐标轴
规划参考线:正义之拳:老王讲的自动驾驶(规划参考线模块)
1、确定规划起点
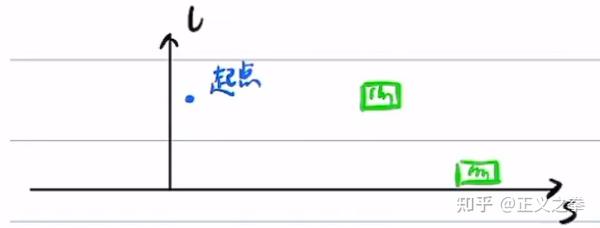
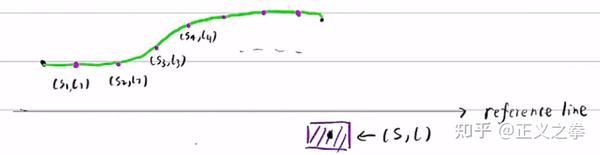
避障还是得在自然坐标系下做,host向参考线投影为坐标原点建立自然坐标系,
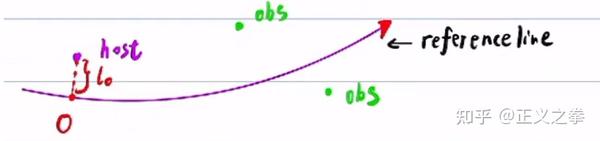 所有障碍物都投影到自然坐标系下面,生成SL图
所有障碍物都投影到自然坐标系下面,生成SL图
自车的位置为(0,l0),因为其在原点上
接下来就开始规划,第一步是确定规划的起点
定位得到的host_x,host_y,投影referenceline,得到SL坐标(0,l0),以此点为路径规划的起点,这么做是错误的。
因为考虑控制是不完美的
规划以100ms周期执行,在上个周期已经规划出轨迹
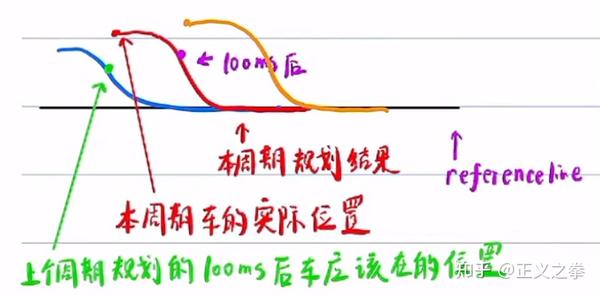
从控制的角度来看,规划的轨迹是割裂的,一段一段不连续的

正确的做法是

判断current location与pre-period规划结果是否误差太大
如果误差太大,就以current location来投影referenceline,以(0,l0)为规划起点
若差别不大,要么当前点投影上个周期轨迹得到P点,要么干脆直接拿当前点当P点

以(s0,l0)作为规划的起点而不是定位的坐标作为起点,效果怎么样
从控制的角度来看,就是一小截一小截的多段首尾连续的轨迹拼接而成
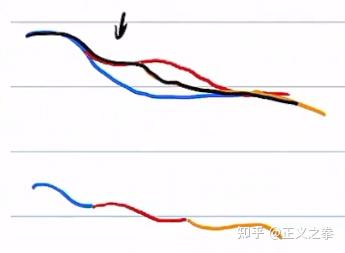
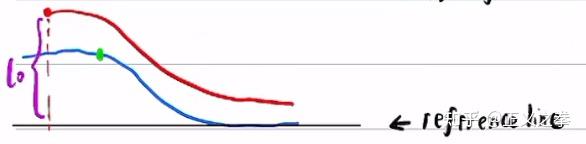
如果用定位作为轨迹的起点
 SL图
SL图
搜索出一条最优路径
最优一般有以下三个标准
(1)平滑
(2)和障碍物保持适当的距离
(3)贴近参考线
可以用二次规划解决
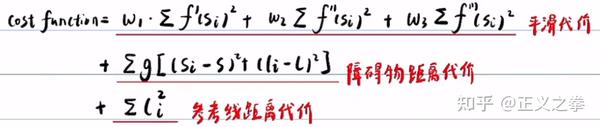
cost function:平滑代价+参考线距离代价+障碍物距离代价
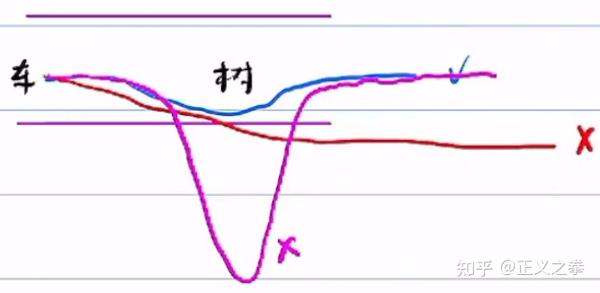
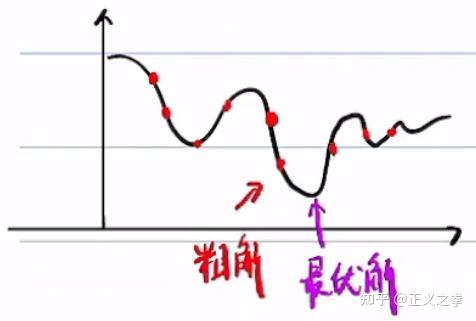
很遗憾:避障问题的二次规划是非凸的,cost function有多个极小值点
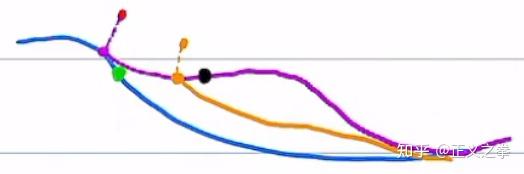
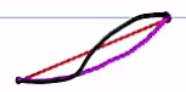
比如,下面这个车绕树的问题,

代价函数如下
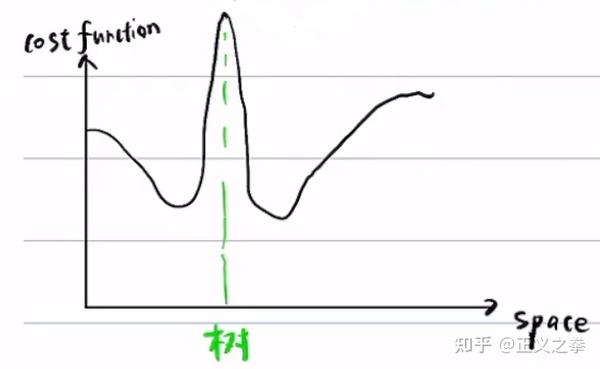
对于非凸问题,没有一个完美的解决方案
方法:离散化,启发式搜索出一个粗解,以粗解为基础优化出最终解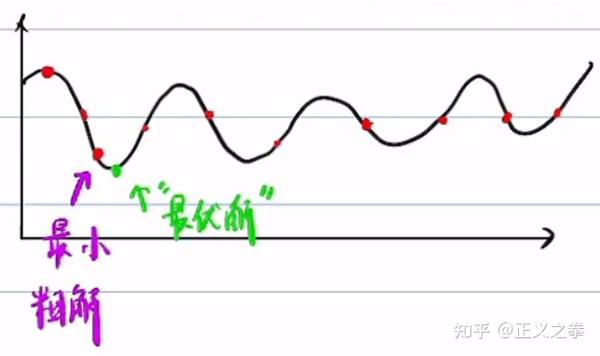
撒点离散化,然后在粗解附近迭代求解,看往左绕还是往右绕最小,如果找到一个最小值往右绕的凸空间,我们就以往右绕的凸空间作为二次规划的凸空间。
这种方法并不完美,会搜到次优解,但是对于自动驾驶也够用了
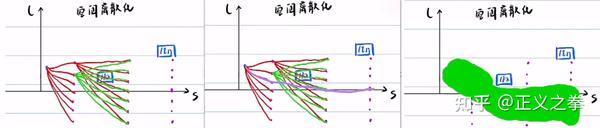
在离散空间下的最优路径是什么,此最优路径将开辟一个凸空间,在此凸空间上做二次规划
离散空间(图1)的最优路径称为粗解(图2),粗解开辟凸空间(图3),在此凸空间上优化出最终解
如何在离散空间上找到粗解? 答:动态规划
下面先说动态规划
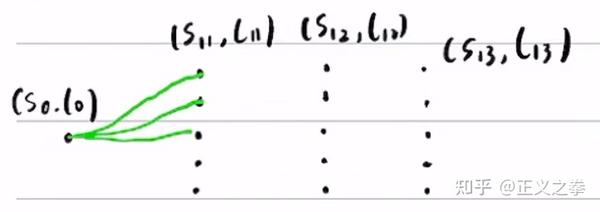
连接每两个点的曲线是什么?
答:五次多项式五次多项式6个系数,求

例:对于起点和下个点

路径规划的起点一般有heading约束,边界条件为:
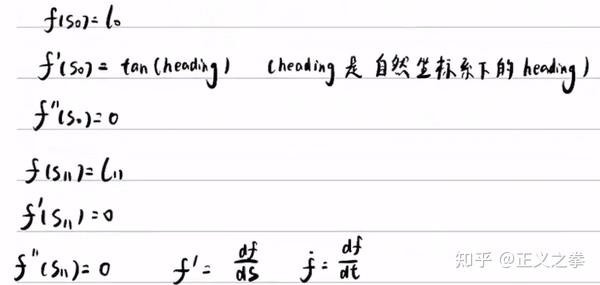
如果对于中间点,怎么确定边界条件

更简单,认为导数为0即可
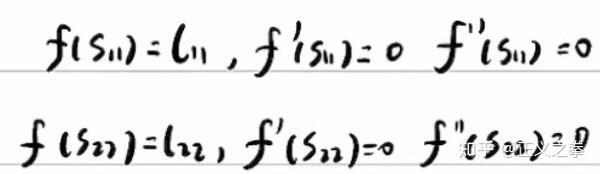
因为这个解是粗解,所以长得什么样无所谓,是用来判断的,开辟凸空间用。
这样就获得了一个离散点组成的路径
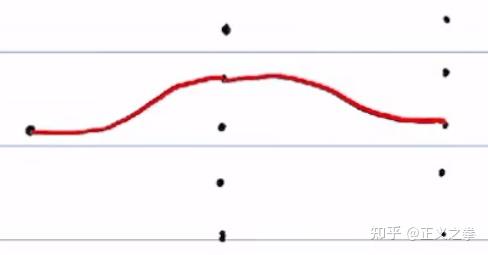
如何评价路径的好坏?cost function
 cost function可以设置为:一二三阶导数求和的平滑代价,再加上障碍物距离代价,参考线距离代价
cost function可以设置为:一二三阶导数求和的平滑代价,再加上障碍物距离代价,参考线距离代价
下面说一下为什么这么设置
(1)平滑:越像直线越平滑,直线最短
所以期望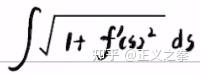
最小,等价于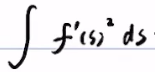
最小,但是积分处理起来麻烦,所以离散化成求和
最小
二阶和三阶求和主要考虑到曲率和曲率的变化率,不希望扭来扭曲,曲率变化太快
(2)障碍物距离代价
g(x)这么设置:在d1范围外为0,在(d2,d1)范围内线性增长,在(0,d1)内为无穷大
或者
其实就是惩罚函数
2、动态规划
下面来说如何找最短路径
每个路径都有对应的cost,问题变为找图的最短路径问题
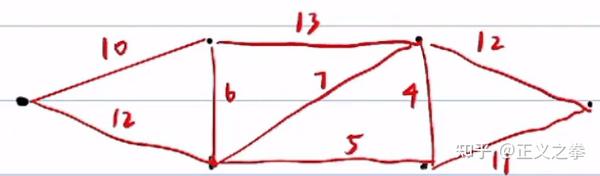
计算机:dijstra算法,自动驾驶没必要
使用动态规划的方法解决这个问题
记cost(P0,Pij)表示P0到Pij点花费的最小代价
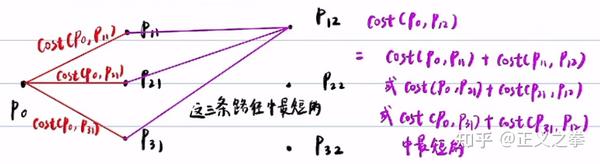 可以得到第二层的最小cost
可以得到第二层的最小cost
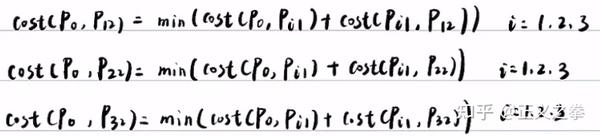
第三层
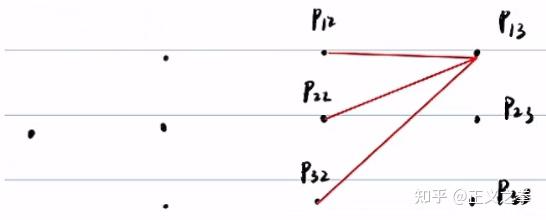
可以得到第三层的最小cost

前面已经算过

所以cost(P0,P13)可由子问题推出
第j层
状态转移方程

得到P0到任一点的最小距离
如果要算第五层

动态规划计算出

,选最小的作为动态规划的输出
3、控制接口,轨迹拼接
现在的控制接口(控制输入)为

规划为100ms,控制周期为10ms,也就是说控制有9个周期都在跟踪同一个点,这样的效果不好,所以在规划周期和控制周期不同步的时候,不能直接用这个输入
想想
是怎么来的
规划:规划出了trajectory,包含了一系列的

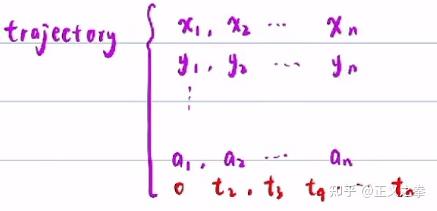
规划周期为100ms,在trajectory找到t=100ms所对应的
(找不到就找100ms相邻的2个时间,做插值),作为规划输出发出去
在规控周期同步时,无问题。不同步时,有问题
因为规划已经规划出了10ms,20ms,……,100ms的轨迹,但只把100ms后的点发了出去,必然造成控制效果变差
所以:原代码中的控制接口不可取,需要改进
改造:规划直接发一条带时间的轨迹给控制
规划输出

控制每10ms搜索trajectory
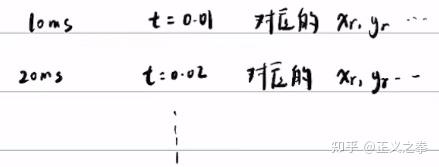
控制根据当前控制周期的时间,搜索轨迹,找到当前时间对应的
,输出给控制算法去跟踪
方法很简单,细节是魔鬼
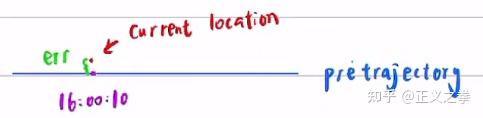
问题一:轨迹的时间是相对时间还是绝对时间?
例:16:00:00开始规划,16:00:10规划完成,规划出了4秒轨迹
有三种发给控制的选择
(1)trajectory-t = (0,……,4)相对时间
(2)trajectory-t = (16:00:00,……,16:04:00)绝对时间
(3)trajectory-t = (16:00:00,……,16:04:10)绝对时间
23区别在于规划的起点
到底是相对时间还是绝对时间?
推荐发绝对时间,因为做拼接,做控制,绝对时间更直观方便
例:16:00 规划了4秒本周期16:00:10 首先获得本周期的时间(16:00:10),直接查找上一时刻规划的16:00:10对应的点
对于控制:16:00:13,查trajectory对应的16:00:13的点,输出给算法进行跟踪
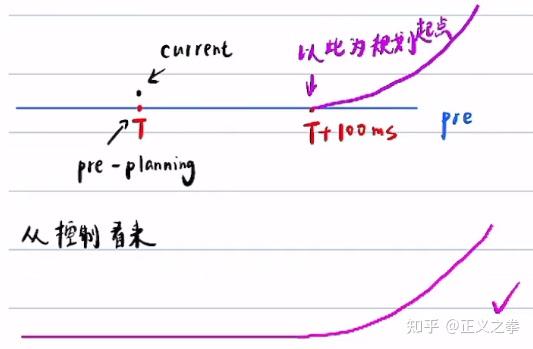
问题二:规划起点
设在本周期规划开始的时间为T
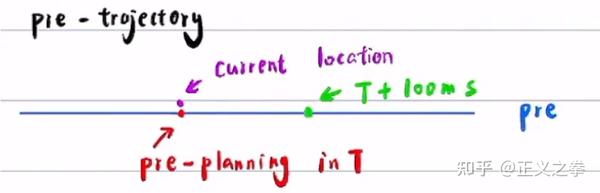
规划起点是T,还是T+100ms?
答:T+100ms
为什么?
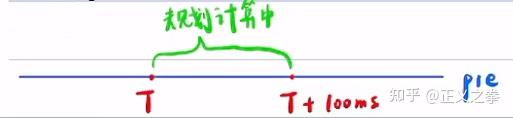
控制频率比规划快,在[T, T+100ms]内,此时规划未计算完成,那么控制跟踪的是哪个轨迹
答:上个周期的轨迹
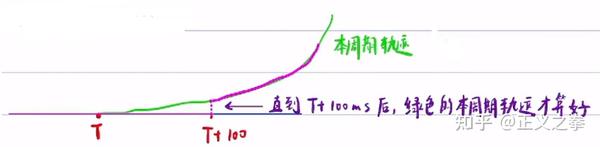
从控制看来
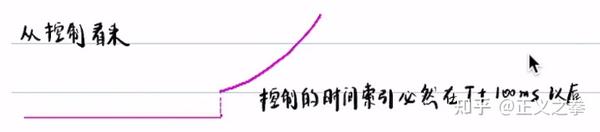
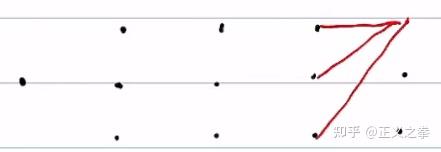
如果以T+100ms为规划起点
这里引用一篇文章:
百度 Apollo 轨迹规划技术分享笔记 – 知乎 (zhihu.com)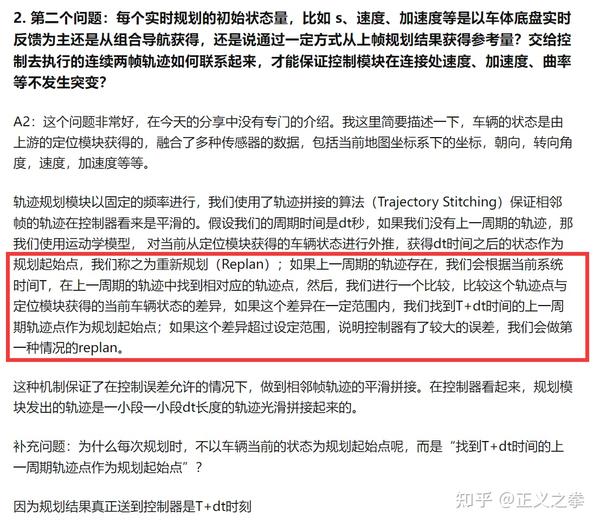
如果误差不大的话,就以T+100ms作为规划起点,如果误差较大的话,就用车辆动力学外推100ms后的状态作为规划起点,这就是轨迹拼接算法
解释为什么不能用定位的点作为规划起点
控制不完美,用定位做就会导致曲线不连续
解决办法:轨迹拼接
发表回复