
编辑于 2023-02-08 01:02・IP 属地北京
目录,作者:BUAA火车侠
成文日期:2022/01/17
1. 惯性测量单元(IMU)概述
惯性测量单元(Inertial measurement unit,IMU),是测量物体三轴姿态角及加速度的装置。IMU通常包含陀螺仪 (Gyroscope)、加速度计 (Accelermeters),有的还包含磁力计(Magnetometers)。陀螺仪用来测量三轴的角速度,加速度计用来测量三轴的加速度,磁力计提供朝向信息。
IMU在手机、VR,航空航天领域都有着广泛应用。比如手机的记步功能就是利用IMU的算法达成;VR中IMU可实现随头部姿态变化而切换场景;Apollo登月中依赖IMU实现位置追踪和朝向确认。

IMU的应用
在自动驾驶中,IMU同样是重要的导航和定位组件。IMU的原理通俗的讲:就是知道自己的初始位置和初始姿态、以及每个时刻的运动加速度和姿态。并将其对时间积分,即可测得当前的位置和姿态信息。
而获得物体当前的姿态以及加速度,则依靠两种硬件:陀螺仪和加速度计。两种仪器都是依靠惯性作用。(角动量守恒与牛顿第二定律),因此才被称之为“惯性导航”。
2. 陀螺仪(Gyroscope)
2.1 传统机械陀螺仪原理:角动量守恒
我们先从最古老的陀螺仪看起,顾名思义,陀螺仪的核心是一个陀螺。当其开始旋转,陀螺仪有抗拒方向改变的趋势,这就是角动量守恒。骑自行车、摩托车不会摔倒也是这个原理,巨型轮船采用的船身稳定系统也是利用这个原理。
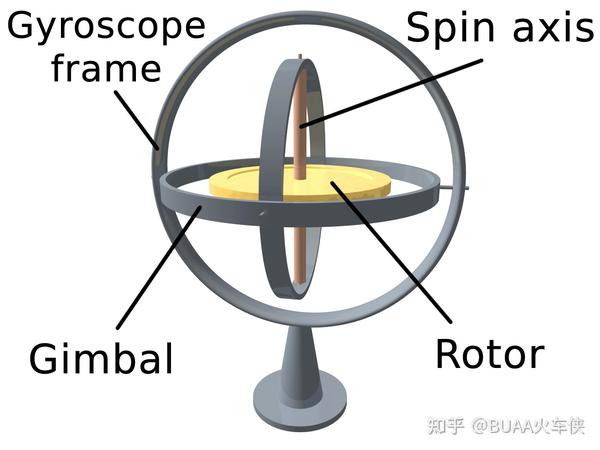 机械陀螺仪
机械陀螺仪
机械陀螺仪的基本部件有:
陀螺转子:常采电机驱动使陀螺转子绕自转轴高速旋转,其转速近似为常值。
内、外框架:使陀螺自转轴获得所需角转动自由度的结构。
附件:力矩马达、信号传感器等。
当陀螺高速旋时,其姿态可以视为不变。此时,当搭载陀螺仪物体的姿态发生变化,则机械陀螺仪的内外框架相对于陀螺的角度就发生了变化。只要测量角度,或者角速度,即可完成对位姿的测量。
陀螺仪的测量模型为(忽略地球自转):
omega(t)=omega_s(t)+b_{gyro}(t)+n_{gyro}(t)
其中:
omega(t) : 陀螺仪输出的角速度;
b_{gyro}(t) :漂移量;
n_{gyro}(t) :噪声项,通常为高斯白噪声,模拟传感器误差。
2.2 陀螺仪的发展
陀螺仪历史很悠久,早在1904年,第一个机械陀螺仪系统就被设计出来了,机械陀螺仪早期应用在武器制导、航空航天领域较多。比如二战时候的V2火箭就采用了陀螺仪导航,尽管其导航并不准确,总是离目的地很远。
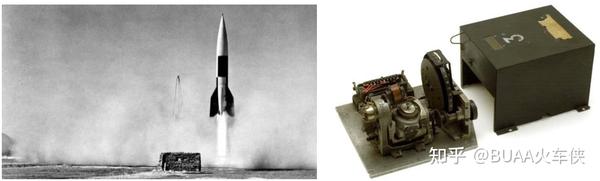
V2火箭中的陀螺仪应用
我们可以很轻易的发现此种陀螺仪存在的问题:高速旋转的陀螺需要极高的机加工工艺,且高速旋转的陀螺需要配合极好的减阻、抗摩擦干扰措施。在70年代以前,陀螺仪的研发重心就在于此。在40年代,工程师采用轴承来减小旋转阻力,50年代则发明了液浮和气浮陀螺仪。60年则出现了挠性支撑陀螺仪。
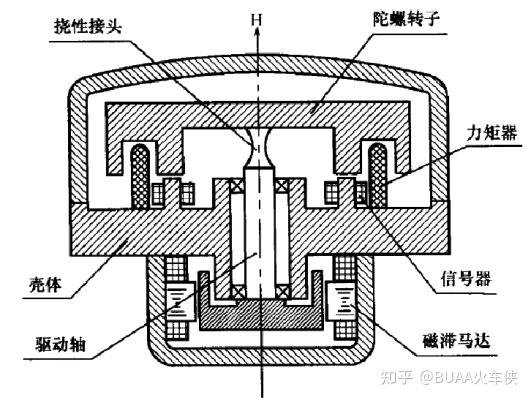
挠性陀螺仪
但这些传统的机械陀螺仪仍然没有跳出牛顿的经典力学原理。而随着70年代先进加工工艺、光学原理的发展也应用,陀螺仪朝着小型化、高精度、高可靠性的方向发展。环形激光陀螺仪、光纤陀螺仪、静电陀螺仪、MEMS陀螺仪等逐渐发展,并在广泛应用于高精度惯导系统中。
这些新的陀螺仪的原理已不再是”角动量守恒”,也不再需要高速旋转的陀螺,比如光纤陀螺仪基于的原理是Sagnac效应,MEMS陀螺仪则是基于 “科氏力和科氏加速度”。
对于量产自动驾驶系统,体积更小、集成度更高、易于规模制造的MEMS陀螺仪自然是首选。因此,我们接下来重点讨论其原理。
2.3 MEMS陀螺仪关于MEMS——微机电系统的相关知识,可以参考:微机电系统_百度百科 (baidu.com),这里不展开。下图加工出来的结构在机械学领域叫“柔性铰链”或者“柔性振子”。(此技术在MEMS激光雷达中也有应用)。
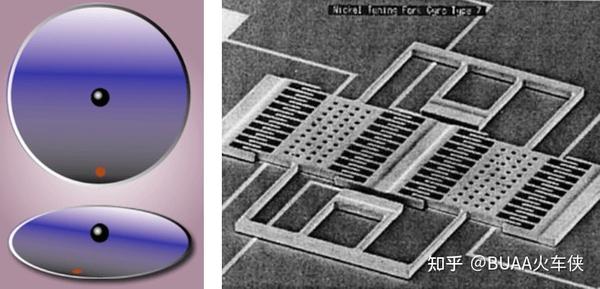
MEMS陀螺仪MEMS陀螺仪原理:
微机电陀螺仪基于的原理是科里奥利力(回忆大学《理论力学》内容)。科氏力的定义稍微有点复杂,简而言之: 以旋转体系为参考系观察,延径向直线运动的物体会由于转动的线速度不同而有偏离原有方向的倾向,这个倾向可以归结为一个外加力的作用
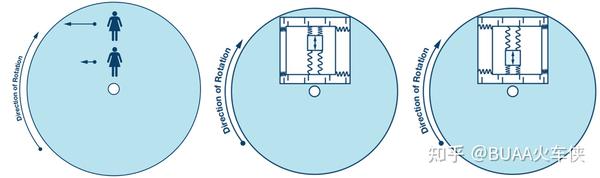
科氏力的直观描述
如图所示,在顺时针旋转的圆盘上,当人从圆心走向边缘,假定这个过程中小人的切向线速度不变,而走到的脚下的圆盘因为半径的增大而线速度增大,所以小人相对圆盘就有相对向左的运动趋势。站在圆盘上看,就好像收到了一个向左的力一样。
把人换成弹簧振子,当振子往边缘运动的时候,收到向左的一个力;当振子往圆心运动的时候,则会受到向右的一个力。 再把弹簧振子连接上垂直于振动方向的电容和弹簧,就可以把科氏力的作用转化为电容值的变化。
而科氏力大小为 vec{F_c}=-2m(vec{omega} times vec{v}) ,其中 m 为质量, v 为质点运动速度, omega 为旋转体系角速度。 times 为外积。那么就可以求解出载体运动的角速度了。
整个信号的转化流程为:测量电容变化->科氏力->旋转角速度->角速度积分可得旋转角度。
具体到实际工作过程:
MEMS机构通过14 kHz的共振结构施加周期性的运动,快速耦合到加速度计框架。科氏加速度与谐振器具有相同的频率和相位,因此可以抵消低速外部振动。
3. 加速度计(Accelermeters)
3.1 加速度计原理
加速度计的根本原理很简单:即是测量加速度引起的达朗贝尔力(回忆大学《理论力学》内容)。物体加速度可表示为: a_{means} = frac{F_{non-gravity}}{m} (排除重力加速度)。
加速度计的模型非常简单,假设真空环境下有一个球放在一个盒中,并且给盒子内壁都安装压敏传感器。在不受外力情况下圆球自然漂浮在盒子中央。当存在加速度时,由于惯性作用,球自然会撞在内壁上,其上的压敏传感器反馈的力 F=ma 。
我们搭电梯时的超重、失重感,开车地板油时的推背感,其实就是这个原理。
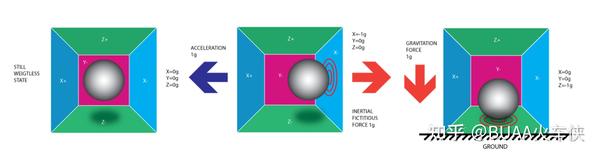
加速度计原理
加速度计的测量模型为:
a(t) = cs_n(t)(ddot{r_n}^{sn}(t)-g_n)+b_{accel}(t)+n_{accel}(t)
其中:
cs_n(t) :传感器方向(通过积分陀螺仪的转速计算);
b_{accel}(t) :漂移量;
n_{accel}(t) : 噪声项,通常为Gaussian Noise,传感器误差;
g_n :重力加速度
3.2 加速度计的小型化
同理,加速度计也可以通过MEMS的手段来实现微型化和集成化。MEMS加速度计的原理如图所示,在硅芯片上用Laser加工出微型柔性铰链,通过柔性铰链的微变形即可测定加速度,其体积小,灵敏度高。
关于柔性铰链的定义和作用方式,可以参考文章自动驾驶感知层的本质——电磁波的应用 下MEMS激光雷达的部分的表述。
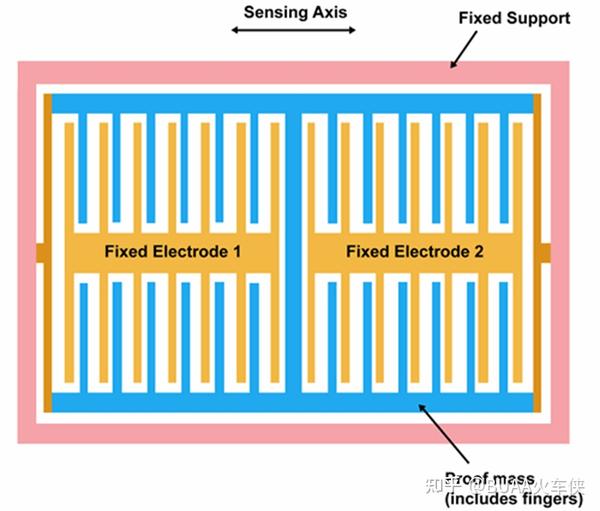 MEMS加速度计
MEMS加速度计
4. 组合导航
IMU有着十分鲜明的优点和缺点,而当其与GNSS相结合的时候,则可以最大程度地扬长避短。这也就是“组合导航”的来源。
4.1 IMU的优缺点
IMU的优点:
相对位置的推演不存在任何外部依赖,是一个完备的系统。相比之下,如GNSS依赖于卫星的覆盖,Lidar,Camera则依赖于对外部的感知,因而存在一定的不稳定性。
正因如此,IMU几乎不受外来信号干扰。机械冲击,电磁干扰,强光等会对其他传感器造成扰动的外界信号对于IMU通通不起作用。
IMU对角速度和加速度的测量值之间本就具有一定的冗余性,再加上汽车的轮速计和方向盘转角等冗余信息,使IMU的输出结果拥有极高的置信度。
IMU的不足:
IMU只能根据提供相对位置和姿态的推演,但却无法提供绝对位置信息;
IMU在使用过程中,如不加校正,其漂移会越来越大,输出结果与真实值的差距越来越大,从而失去使用价值。
由前面分析可知,陀螺仪对当前角度的推测是基于上一时刻的角度位置,其并不能对绝对的位置
所以需要对陀螺仪的输出对时间积分才能得到朝向信息,在积分的过程中,随着时间的积累,误差也会持续累积,最终使得朝向发生偏移(Drift)。
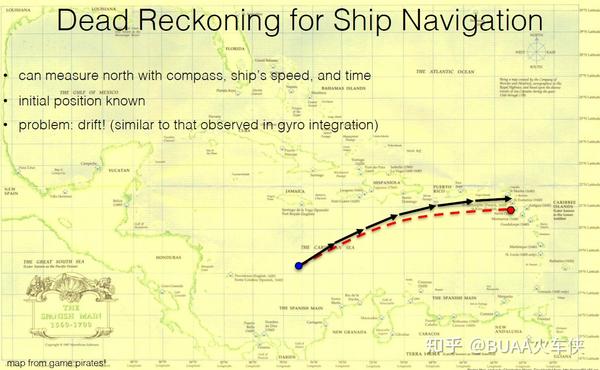
陀螺仪的漂移Drift
4.2 组合导航原理
已知IMU属于内部闭环的导航系统,在运动过程中没有外部更新数据来对误差进行修正。而将其与GNSS-RTK导航相结合,即可对内部的累计误差进行修正。
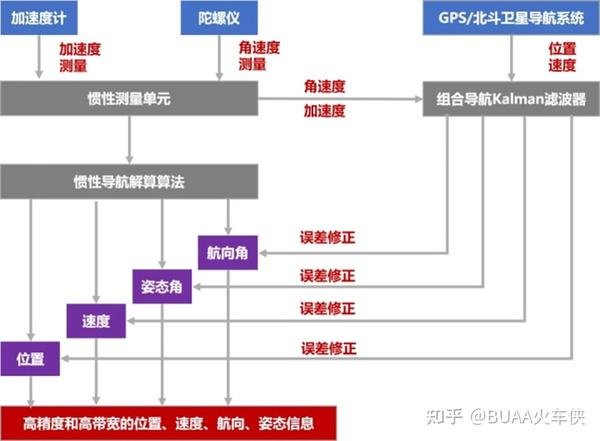
组合惯导的工作逻辑组合导航与其他定位方式的对比如下表:

不同定位方法之间的对比,From 《A Survey of Autonomous Driving: Common Practices and Emerging Technologies》
在组合导航中,IMU也是自动驾驶定位的最后一道防线,其原因是:
IMU可以对RTK结果进行验证和修正。比如RTK输出结果在短时间内发生很大变化,而IMU却并未出现如此变化,证明RTK的定位出现了问题,可以由IMU暂时接管定位系统,等待RTK恢复正常。
当车辆驶入大城市、山区,失去卫星信号后。此时,IMU也可以延续若干秒的精确定位,为自动驾驶车辆切换到其他定位方式争取宝贵的反应时间,保证车辆的安全。
在基于视觉、雷达的定位方法受到外界干扰(如强光照射)而短暂失效的情况下。IMU依然可以稳定发挥作用,确保车辆一段时间内行驶在车道内。
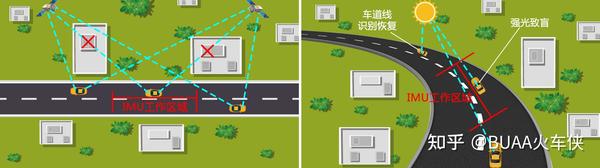
IMU的作用
事实上,当前的主机厂也是这么做的,一系列品牌,在许多车型上都采用了组合GNSS-RTK+IMU的组合导航模块:比如ZED F9R。其量产成本不到千元,能够为ADAS系统提供极高的安全冗余。
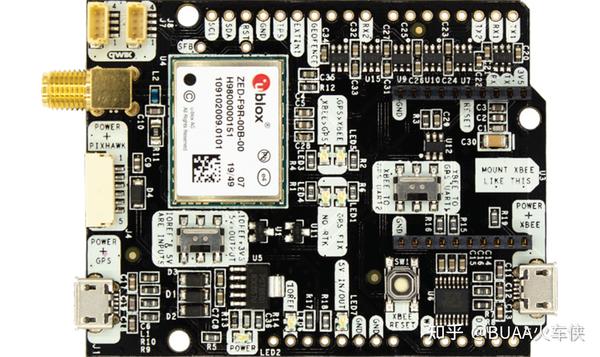
车用组合惯导模块:RTK+IMU ZED F9R
发表回复