
发布于 2023-01-10 09:56・IP 属地江苏
CyberLoc: Towards Accurate Long-term Visual Localization提交时间:2023年1月6日论文 :https://arxiv.org/pdf/2301.02403.pdf代码:摘要:本文报告介绍了 CyberLoc,是一种基于图像的视觉定位pipline,可在具有挑战性的条件下进行稳健而准确的长期姿态估计。所提出的方法按顺序可分为四个模块。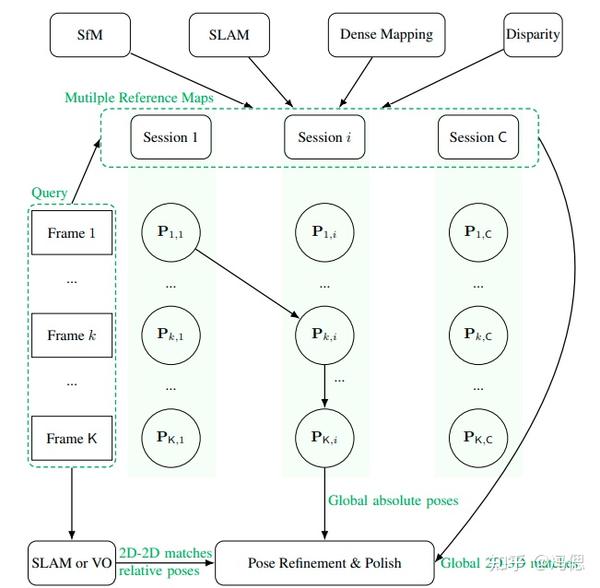
首先,应用映射模块来构建场景的精确 3D 地图,如果在不同条件下存在多个参考序列,则每个参考序列一张地图。其次,执行基于单图像的定位pipline(检索 – 匹配 – PnP)以估计每个查询图像的 6-DoF 相机姿势,每个 3D 地图一个。第三,提出了一个共识集最大化模块来过滤掉离群的 6-DoF 相机位姿,并输出一个 6-DoF 相机位姿用于查询。最后,提出了一个鲁棒的姿势细化模块来优化 6-DoF 查询姿势,以候选全局 6-DoF 相机姿态及其相应的全局 2D-3D 匹配、连续查询图像和查询序列的 SLAM 姿态之间的稀疏 2D-2D 特征匹配作为输入。在 4seasons 数据集上的实验表明,该方法具有很高的准确性和鲁棒性。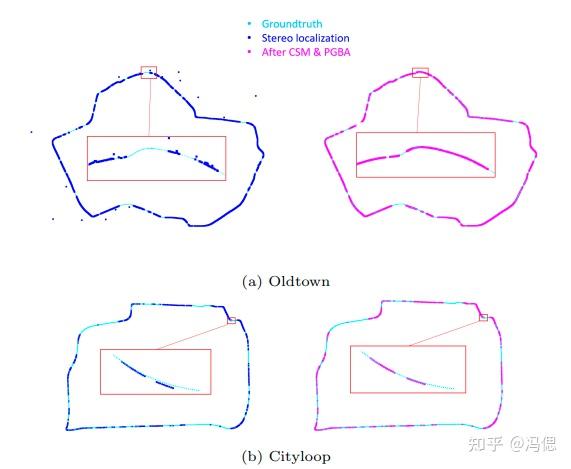
往期精选:自动驾驶开发者说|前沿|ECCV2022有哪些自动驾驶方面的工作?自动驾驶开发者说| 前沿 | CVPR2022有哪些自动驾驶方面的工作?自动驾驶开发者说| 求职 | 2022年如何找到优秀的自动驾驶公司?自动驾驶开发者说|前沿|基于BEV的自动驾驶会颠覆现有的自动驾驶架构吗?自动驾驶开发者说|技术栈|入门感知模块需要储备哪些知识?自动驾驶开发者说 | 前沿|如何定义&检测&解决Corner Cases?自动驾驶开发者说| 前沿 | 2022年ViT(vision transform)如何应用在自动驾驶任务上?自动驾驶开发者说| 前沿 | 近两年有哪些ViT(Vision Transformer)的改进算法?自动驾驶开发者说 | 前沿|如何进行LiDAR-Camera(雷达-相机)的联合标定?
发表回复