
10 小时前
参考链接:如何看待百度11月29日的Apollo Day技术开放日?目前自动驾驶技术发展到了什么水平?2022-11-29 百度Apollo Day智能驾驶录播_哔哩哔哩_bilibili前言:Apollo的L4和L2技术方案分化与融合受Tesla影响,百度从2019年开始技术路线从单一的Waymo模式转向了Waymo+Tesla并重的模式,在百度存在重激光的L4技术方案和重视觉的L2+技术方案。L4主要面向Robotaxi,比如开源的Apollo;L2+主要面向辅助驾驶,比如纯视觉的Apollo Lite。由于尚且没有搭载百度Apollo Lite的量产车发布,猜测数据来自类似萝卜快跑的车辆。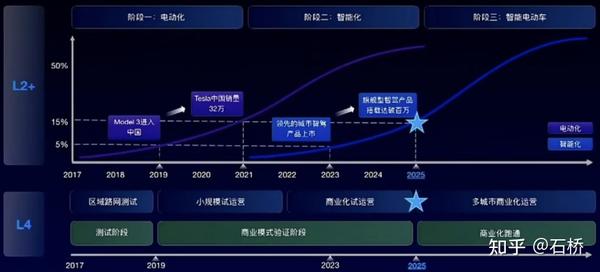 2025年:L2+产品跨越鸿沟,L4商业模式初跑通。Apollo ai day的发展趋势表明L2+将率先发力量产落地,2023起开始进入放量翻倍阶段,L4仍然处于商业化区域运营的阶段。L4的技术难度和未来的盈利能力都远超L2,但需要更长时间,二者的需求存在巨大差异所以各自的方案也有所侧重。下面是L4的商业路线规划:
2025年:L2+产品跨越鸿沟,L4商业模式初跑通。Apollo ai day的发展趋势表明L2+将率先发力量产落地,2023起开始进入放量翻倍阶段,L4仍然处于商业化区域运营的阶段。L4的技术难度和未来的盈利能力都远超L2,但需要更长时间,二者的需求存在巨大差异所以各自的方案也有所侧重。下面是L4的商业路线规划: L4 Robotaxi的落地规划从PPT来看,Apollo的L4方案仍然采用360°的环视lidar,多半是机械激光lidar,技术方案类似于Apollo开源方案。
L4 Robotaxi的落地规划从PPT来看,Apollo的L4方案仍然采用360°的环视lidar,多半是机械激光lidar,技术方案类似于Apollo开源方案。 L2硬件配置L2的方案则明显趋向于国内市场主流的Orin + 环视 + 半固态激光lidar,技术方案侧重于视觉主导,激光辅助。L2和L4的区别显然不只是一个lidar的问题,在AI day上百度将其整合为了ANP3.0的技术方案。
L2硬件配置L2的方案则明显趋向于国内市场主流的Orin + 环视 + 半固态激光lidar,技术方案侧重于视觉主导,激光辅助。L2和L4的区别显然不只是一个lidar的问题,在AI day上百度将其整合为了ANP3.0的技术方案。 ANP3.0感知系统上述感知方案很明显是松耦合,Lidar主要用于感知障碍物,作为安全保障和备份,实际的核心方案仍然是Apollo Lite++,在深度感知之外视觉对于自动驾驶L2->L4的升级更为重要,在ANP3.0下视觉方案将优先获得优化升级。纯视觉的Apollo Lite感知方案从2019年至今演化出了2个版本:Apollo Lite和Apollo Lite++。Apollo Lite(2019-2021):采用单目2D&3D感知+环视后处理策略关联融合方案:
ANP3.0感知系统上述感知方案很明显是松耦合,Lidar主要用于感知障碍物,作为安全保障和备份,实际的核心方案仍然是Apollo Lite++,在深度感知之外视觉对于自动驾驶L2->L4的升级更为重要,在ANP3.0下视觉方案将优先获得优化升级。纯视觉的Apollo Lite感知方案从2019年至今演化出了2个版本:Apollo Lite和Apollo Lite++。Apollo Lite(2019-2021):采用单目2D&3D感知+环视后处理策略关联融合方案: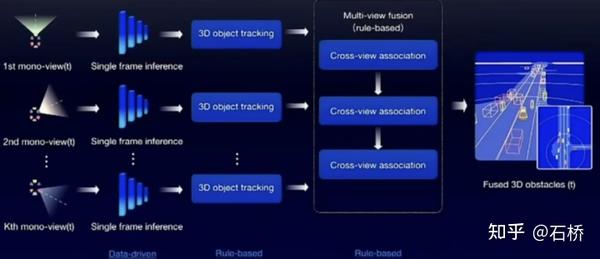 Apollo视觉感知(更为详细参见量子位:百度背叛激光雷达路线了吗?这里写的很详细,不只是感知)Apollo Lite++(2022):时序BEV感知时空融合,端到端障碍物检测和轨迹意图预测结果
Apollo视觉感知(更为详细参见量子位:百度背叛激光雷达路线了吗?这里写的很详细,不只是感知)Apollo Lite++(2022):时序BEV感知时空融合,端到端障碍物检测和轨迹意图预测结果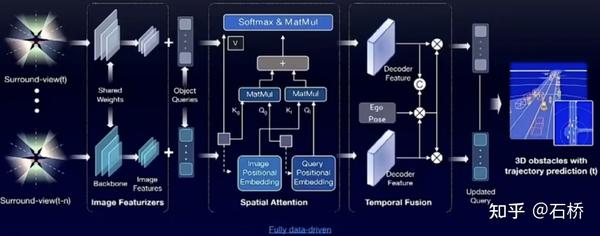 Apollo Lite++感知预测方案Apollo Lite应该是具备完成纯视觉的L2+感知的能力,只所以升级为BEV是因为沿Tesla方案可以拓展视觉在预测、规划、建图等方面的体系能力。自动驾驶技术需要一个统一的体系,而非模块间的离散组合。BEV用于预测和规划的介绍比较少(还得看Tesla),但是对于建图的意义叙述的非常明确:
Apollo Lite++感知预测方案Apollo Lite应该是具备完成纯视觉的L2+感知的能力,只所以升级为BEV是因为沿Tesla方案可以拓展视觉在预测、规划、建图等方面的体系能力。自动驾驶技术需要一个统一的体系,而非模块间的离散组合。BEV用于预测和规划的介绍比较少(还得看Tesla),但是对于建图的意义叙述的非常明确: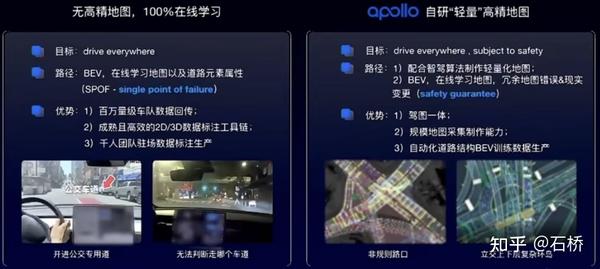 BEV方案是建图和更新的基石总结来说:无地图的区域就建图,有地图的区域就更新;颠覆传统方案,推动高精地图的轻量化。当前自动驾驶高精度地图的生产成本高、效率低、更新慢、规模小(相对),已经无法跟上自动驾驶的发展需要,制图方案的变更势在必行,Tesla的BEV方案提供了一种全新的建图方案,这是未来的发展趋势,也是轻地图由来。
BEV方案是建图和更新的基石总结来说:无地图的区域就建图,有地图的区域就更新;颠覆传统方案,推动高精地图的轻量化。当前自动驾驶高精度地图的生产成本高、效率低、更新慢、规模小(相对),已经无法跟上自动驾驶的发展需要,制图方案的变更势在必行,Tesla的BEV方案提供了一种全新的建图方案,这是未来的发展趋势,也是轻地图由来。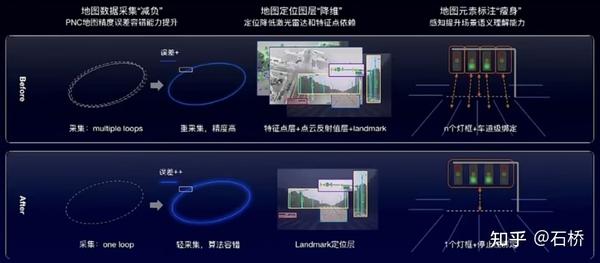 Apollo轻地图方案轻地图中“轻”的程度取决于自动驾驶算法精进的精进程度,轻地图是对自动驾驶实时在线感知建图等能力的补充。
Apollo轻地图方案轻地图中“轻”的程度取决于自动驾驶算法精进的精进程度,轻地图是对自动驾驶实时在线感知建图等能力的补充。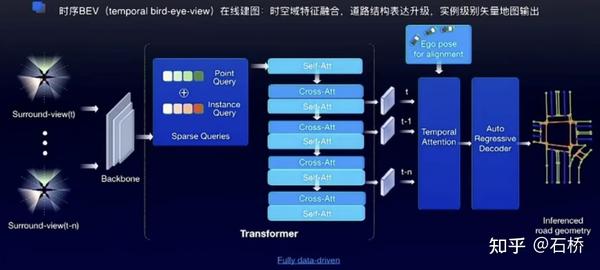 BEV道路结构预测、实时在线地图学习框架百度的对BEV的使用几乎与Tesla一致,而且独有的优势是在L4区域拥有的高精地图可以协助生产BEV训练数据。
BEV道路结构预测、实时在线地图学习框架百度的对BEV的使用几乎与Tesla一致,而且独有的优势是在L4区域拥有的高精地图可以协助生产BEV训练数据。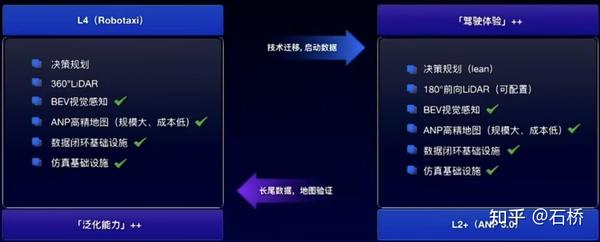 技术架构统一,视觉感知方案统一,地图统一,数据打通、基础设施共享L2+百度的ANP3.0的正在沿着Tesla方案推进整个驾驶技术体系,前期的Robotaxi L4方案也将逐步融合。(从这里可以看出所谓的L4方案,最终应该会被拥有数据优势的L2+方案整合)。未完待续。。。。
技术架构统一,视觉感知方案统一,地图统一,数据打通、基础设施共享L2+百度的ANP3.0的正在沿着Tesla方案推进整个驾驶技术体系,前期的Robotaxi L4方案也将逐步融合。(从这里可以看出所谓的L4方案,最终应该会被拥有数据优势的L2+方案整合)。未完待续。。。。
发表回复