
发布于 2023-01-12 10:13・IP 属地江苏
Simulation-based Validation for Autonomous Driving Systems提交时间:2023年1月10日论文 :https://arxiv.org/pdf/2301.03941.pdf代码:摘要:仿真对于验证自动驾驶系统至关重要。然而,一个简单的仿真系统,即使有非常多的模拟英里数或小时数,也是不够的。需要有根据的标准来评价仿真系统涵盖了大部分现实情况。此外,仿真验证不仅涉及事件,还涉及对潜在危险情况(例如交通违规)的检测。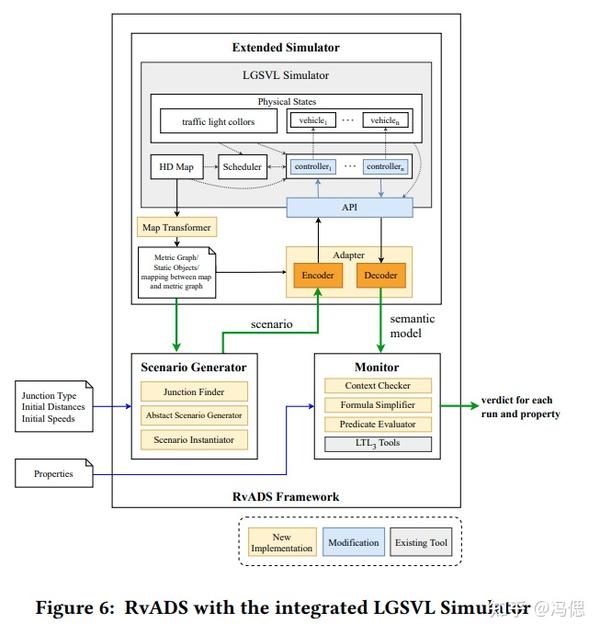 本文提出了一种用于自动驾驶系统的仿真模拟和基于测试的验证方法,该方法集成了现有的工业仿真器和正式定义的测试环境。
本文提出了一种用于自动驾驶系统的仿真模拟和基于测试的验证方法,该方法集成了现有的工业仿真器和正式定义的测试环境。 该环境包括一个场景生成器,它驱动仿真处理并包含一个监视器。验证方法包括从仿真器中提取模拟系统的语义模型,包括度量图,度量图是系统车辆在其中的数学模型。我们提出了一种方法来系统地生成涵盖潜在风险情况的场景集,而不是像许多模拟器那样随机探索系统行为,特别是对于必须遵守特定交通规则的不同类型的路口。
该环境包括一个场景生成器,它驱动仿真处理并包含一个监视器。验证方法包括从仿真器中提取模拟系统的语义模型,包括度量图,度量图是系统车辆在其中的数学模型。我们提出了一种方法来系统地生成涵盖潜在风险情况的场景集,而不是像许多模拟器那样随机探索系统行为,特别是对于必须遵守特定交通规则的不同类型的路口。 往期精选:自动驾驶开发者说|前沿|ECCV2022有哪些自动驾驶方面的工作?自动驾驶开发者说| 前沿 | CVPR2022有哪些自动驾驶方面的工作?自动驾驶开发者说| 求职 | 2022年如何找到优秀的自动驾驶公司?自动驾驶开发者说|前沿|基于BEV的自动驾驶会颠覆现有的自动驾驶架构吗?自动驾驶开发者说|技术栈|入门感知模块需要储备哪些知识?自动驾驶开发者说 | 前沿|如何定义&检测&解决Corner Cases?自动驾驶开发者说| 前沿 | 2022年ViT(vision transform)如何应用在自动驾驶任务上?自动驾驶开发者说| 前沿 | 近两年有哪些ViT(Vision Transformer)的改进算法?自动驾驶开发者说 | 前沿|如何进行LiDAR-Camera(雷达-相机)的联合标定?
往期精选:自动驾驶开发者说|前沿|ECCV2022有哪些自动驾驶方面的工作?自动驾驶开发者说| 前沿 | CVPR2022有哪些自动驾驶方面的工作?自动驾驶开发者说| 求职 | 2022年如何找到优秀的自动驾驶公司?自动驾驶开发者说|前沿|基于BEV的自动驾驶会颠覆现有的自动驾驶架构吗?自动驾驶开发者说|技术栈|入门感知模块需要储备哪些知识?自动驾驶开发者说 | 前沿|如何定义&检测&解决Corner Cases?自动驾驶开发者说| 前沿 | 2022年ViT(vision transform)如何应用在自动驾驶任务上?自动驾驶开发者说| 前沿 | 近两年有哪些ViT(Vision Transformer)的改进算法?自动驾驶开发者说 | 前沿|如何进行LiDAR-Camera(雷达-相机)的联合标定?
发表回复