
发布于 2023-01-06 11:55・IP 属地江苏
POLICY PRE-TRAINING FOR AUTONOMOUS DRIVING VIA SELF-SUPERVISED GEOMETRIC MODELING
提交时间:2023年1月1日
论文 :https://arxiv.org/pdf/2301.01006.pdf
代码:https://github.com/OpenDriveLab/PPGeo
摘要:
cv和nlp领域大规模数据预训练技术取得的令人瞩目的成就,目前基于视觉的自动驾驶任务本质上缺乏视图和平移不变性,并且视觉输入包含大量与决策无关的信息,导致一般视觉的主要预训练方法不太适合自动驾驶任务。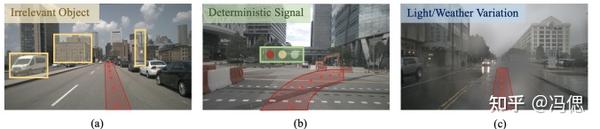
PPGeo(通过几何建模进行策略预训练),这是一种直观且直接的完全自监督框架,专为视觉运动驾驶中的策略预训练而设计。通过大规模未标记的YouTube驾驶视频上建模 。
PPGeo 分两个阶段执行,以支持有效的自我监督培训。
第一阶段,几何建模框架以两个连续帧作为输入同时生成姿势和深度预测。
第二阶段,视觉编码器通过优化预测未来运动和当前的误差来学习驾驶。因此,预训练的视觉编码器包含丰富的驾驶策略相关表示,从而能够胜任多项视觉运动驾驶任务。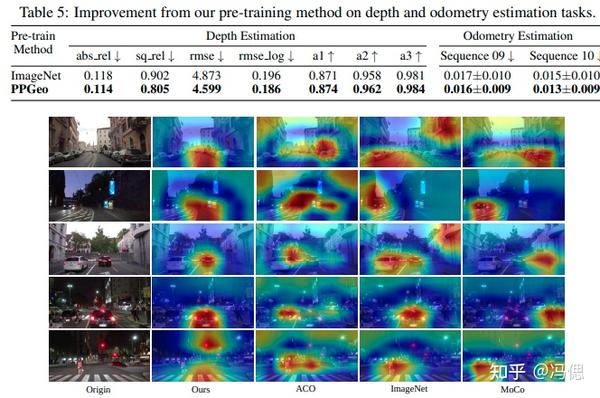
发表回复