
自2019年特斯拉发布自动驾驶FSD HW3.0之后,时隔三年多,HW4.0也即将发布,外网已经有对HW4.0的拆解,一起来看看。
1. 外观
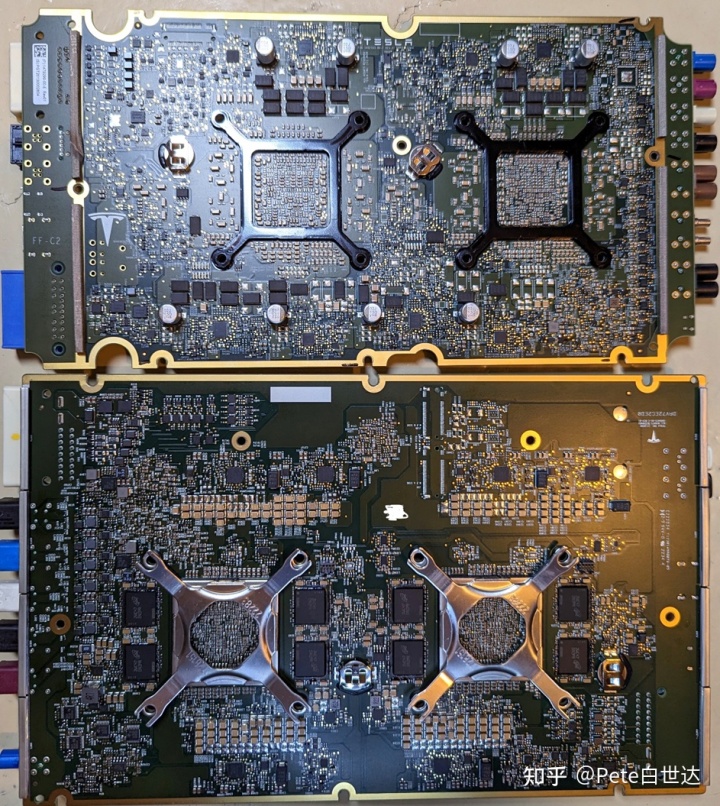
外观对比如下图,HW4.0略大于HW3.0,安装点由3个调整为四个。
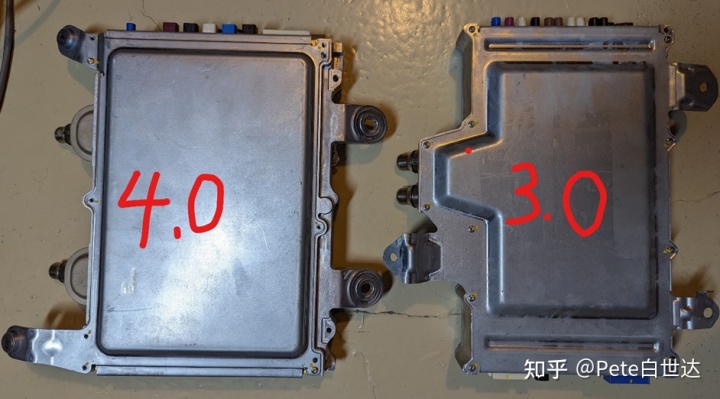 HW4.0 & HW3.0 外观对比
HW4.0 & HW3.0 外观对比
2. 传感器
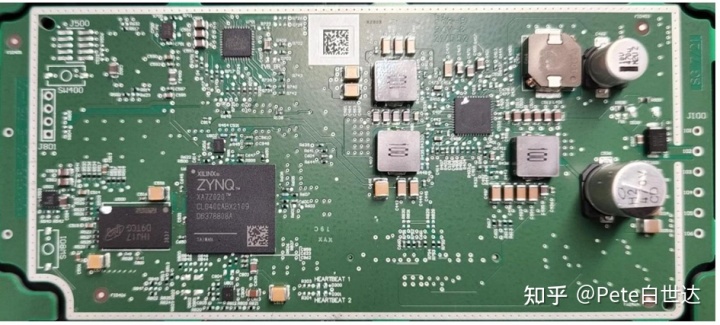
1)首先是增加了一个前视毫米波雷达。
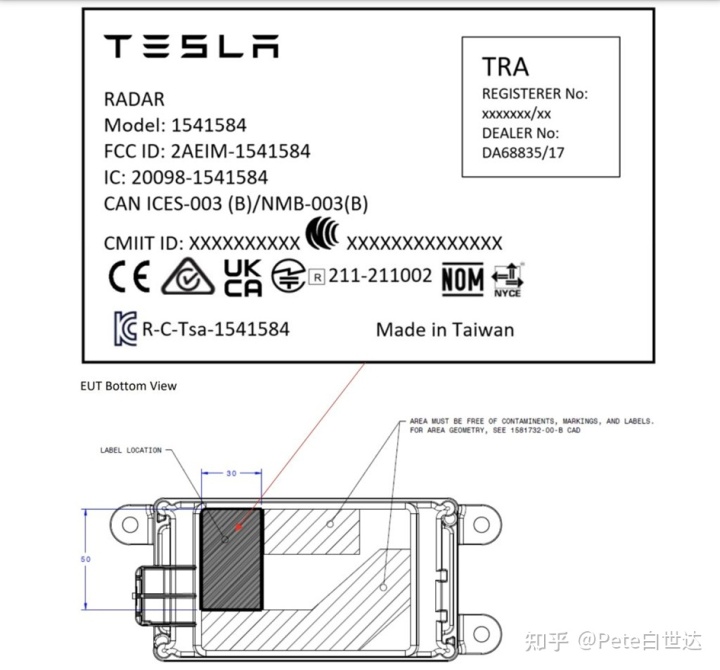
其实今年年初,网上就爆出来特斯拉在美国通过了一款毫米波雷达的FCC认证,代号PHONENIX.
雷达实物约80mm*190mm,PCB板如图,主芯片是塞灵思的XA7Z020。

雷达天线布局如下图。
当前拆解中可以看到,天线芯片有点模糊,看上去是德州仪器(TI)的AWR的某款芯片。这款PHONENIX雷达横向尺寸很宽,接近200mm,右边的三个高度错开的天线,是为了提高俯仰角方向的探测精度。具体这款雷达的能力如何,还得看实际产品的表现。
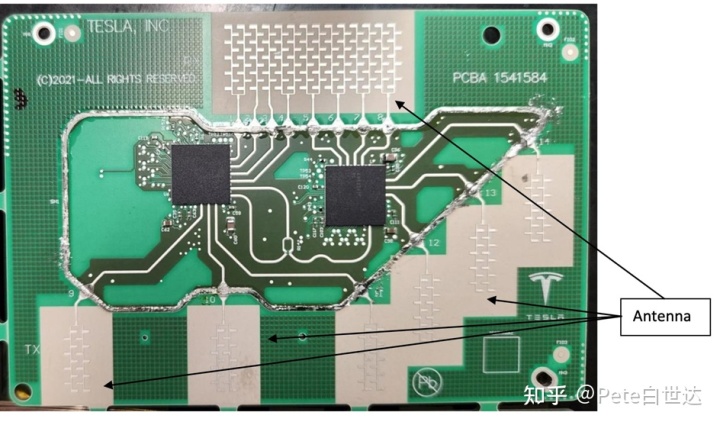 毫米波雷达天线设计
毫米波雷达天线设计
怎么说呢,特斯拉回归毫米波雷达,看上去也没打算一步到位,只是因为现在毫米波雷达技术进步了点,价格又降了点,所以花个小价钱,改善改善ACC和AEB的性能,减少一些撞墙之类的负面新闻。
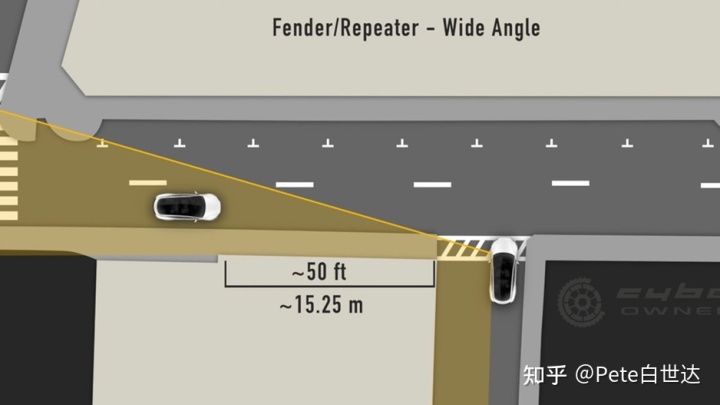
2) 其次是新增4个摄像头接口,从原先的8个增加为12个。
其中一个标记了‘备用‘,所以是新增了3个摄像头。


HW4.0新增摄像头接口
根据这几个摄像头接口的标记:F-SVC, L-SVC, R-SVC,推断这几个摄像头会装在前轮上方,或者保险杠的某个位置,可能主要为了解决横穿盲区问题,如下图。
3) 另外,已有摄像头也有所优化。
根据特斯拉中国的相关工艺文件,主要的变化是前挡的三目摄像头变为双目,并增加摄像头风扇,同时把其他摄像头均切换为AP4摄像头。

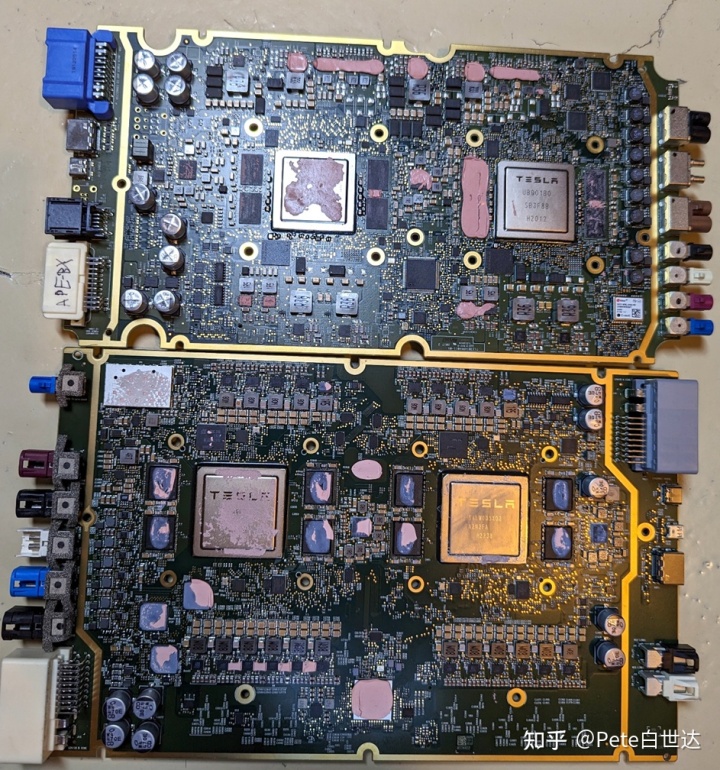
3. PCB板
FSD芯片架构方面相比HW3.0,没有大家预期的那么大的变化。
HW4.0 内的FSD芯片(7nm制程,三星代工)的架构:
20个CPU核(CPU架构未知 ) ,分成5个集群,每个集群包含4个CPU核心,CPU的最大频率为2.35GHz,闲时频率1.37GHz
3个NPU,工作频率为2.2GHzH
W3.0上GPU有一块单独PCB板,HW4.0将其集成为1块板子,所以HW4.0厚度更薄,但依旧是16G RAM加256G NVME 的AMD CPU 和 GPU.
 最后,关于已销售车辆会不会更新HW4.0呢?毕竟买了AP的消费者也是掏了不少钱订购了这个长期服务。
最后,关于已销售车辆会不会更新HW4.0呢?毕竟买了AP的消费者也是掏了不少钱订购了这个长期服务。
马斯克表示不会为已经出售的车型提供改装,将继续用HW3.0兑现自动驾驶承诺。原话如下:
Hardware 3 will not be as good as Hardware 4, but I’m confident that Hardware 3 will so far exceed the safety of the average human. So how do we get ultimately to – let’s say, for argument’s sake, if Hardware 3 can be, say, 200% or 300% safer than humans, Hardware 4 might be 500% or 600%. It will be Hardware 5 beyond that. But what really matters is are we improving the average safety on the road.
所以吧,买这种服务,考虑现在的性能就行,将来只会更便宜更好用,同学们别吃饼。
发表回复