
原文链接:https://zhuanlan.zhihu.com/p/31442240588
今日自动驾驶前沿算法更新:
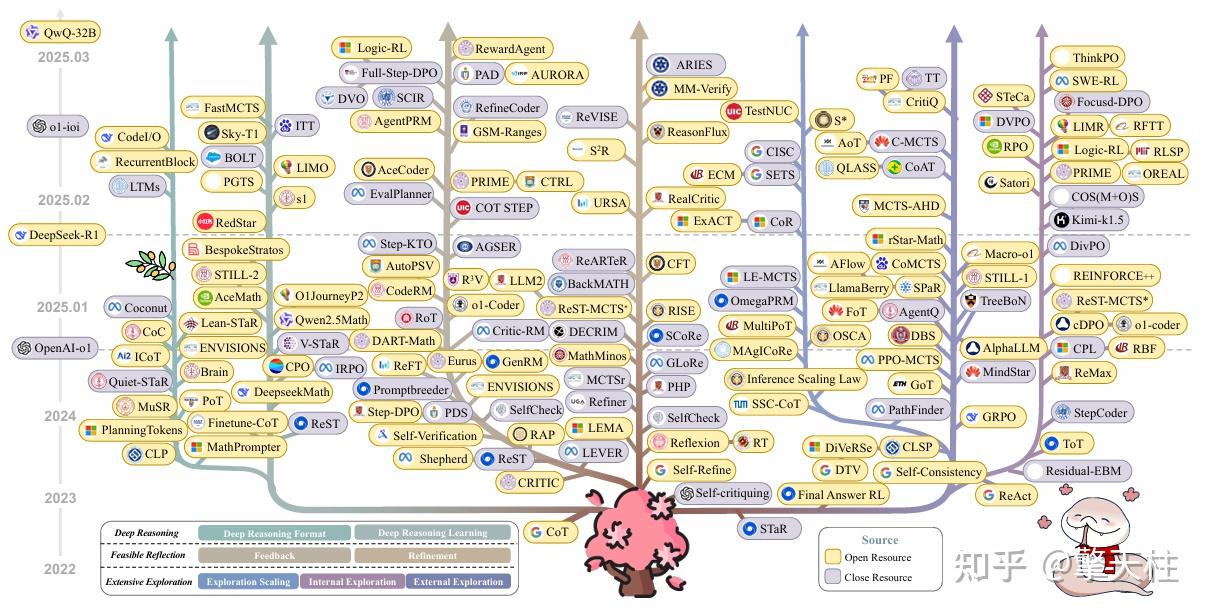
Towards Reasoning Era
- 论文标题:Towards Reasoning Era: A Survey of Long Chain-of-Thought for Reasoning Large Language Models
- 论文链接:https://arxiv.org/abs/2503.09567
- 项目主页: https://long-cot.github.io/
核心创新点:
1. 理论框架创新
- Long CoT范式定义
首次系统性区分长链思维(Long CoT)与 短链思维(Short CoT) ,明确Long CoT的三大核心特征:
- 深度逻辑处理 :通过扩展推理节点数量与复杂度,支持多层级逻辑结构整合。
- 广泛探索(Extensive Exploration) :引入并行不确定节点生成与未知逻辑迁移机制,突破线性推理局限。
- 可行反思(Feasible Reflection) :基于反馈的动态逻辑修正,提升复杂任务中的容错能力。
2. 技术方法创新
推理增强技术
- 动态并行树搜索(Dynamic Parallel Tree Search) 通过多分支并行生成与剪枝策略,优化复杂推理路径的探索效率(如MCTS与A* 搜索改进)。强化微调(Reinforcement Fine-Tuning, RFT) 结合过程奖励模型(PRM)与 结果奖励模型(ORM) ,实现分阶段强化学习(如OpenRFT框架)。自反思框架(Self-Reflection Framework) 引入模型自检与错误修正机制(如Critic-CoT、ARIES),通过迭代优化提升逻辑一致性。
知识整合策略
- 混合反馈机制(Hybrid Feedback) 融合全局反馈(最终答案正确性)与 过程反馈(中间步骤合理性) ,结合SFT-based精细化模仿学习。
- 外部探索(External Exploration) 基于多智能体协作的图搜索(如SoS、CoRAG)与人类先验知识注入,扩展推理边界。
3. 评估体系创新
复杂任务基准扩展 提出高难度数学推理数据集(如AIME 2024 、FrontierMath )与代码生成验证基准(如StepCoder ),量化Long CoT的泛化能力。 推理边界量化 定义概念深度(Concept Depth)与 推理容量上限 ,分析模型在复杂任务中的性能衰减阈值(如GSM-Infinite测试)。
4. 优化机制创新
- 自学习策略(Self-Learning Strategies) 通过自博弈(Self-Play)与 弱监督蒸馏 (如STaR、V-STaR),实现无标注数据下的推理能力迭代。
- 高效推理架构 采用蒙特卡洛树搜索(MCTS)与 Q值排序 优化决策路径,降低长序列推理的计算冗余(如QLASS、DQO)。
5. 安全与可解释性
- 安全推理框架 提出对抗性验证(Adversarial Verification)与 医疗专用纠错(Medec) ,增强高风险场景下的鲁棒性。
- 可解释性分析 通过概率混合模型(PMM)与 信息论一致性(ITC) ,量化模型推理策略的置信度与可解释性。
本文内容均出自『自动驾驶之心知识星球』,欢迎加入交流。这里已经汇聚了近4000名自动驾驶从业人员,每日分享前沿技术、行业动态、岗位招聘、大佬直播等一手资料!欢迎加入~
https://t.zsxq.com/04NneQvBM (二维码自动识别)
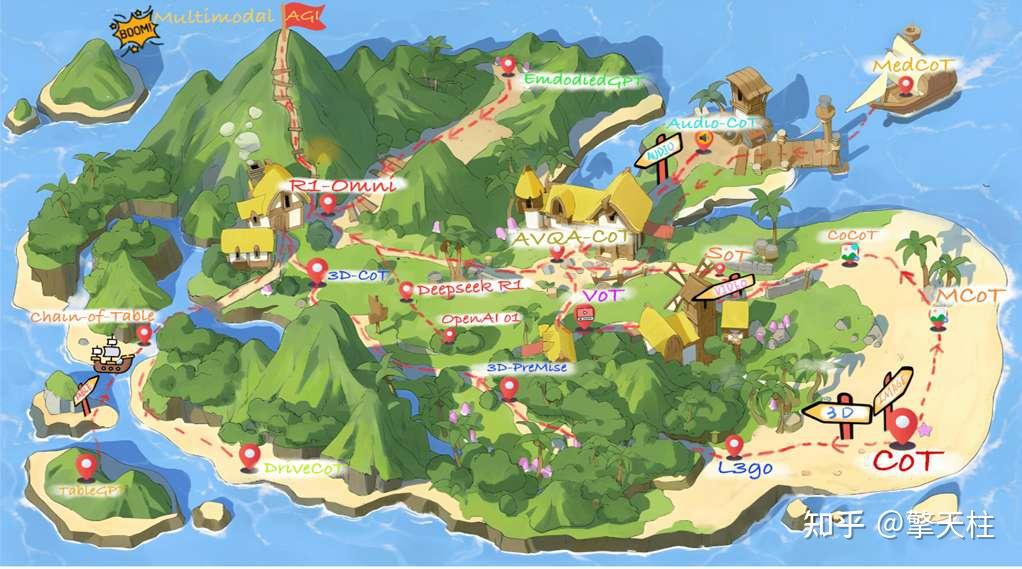
Multimodal Chain-of-Thought Reasoning
- 论文标题:Multimodal Chain-of-Thought Reasoning: A Comprehensive Survey
- 论文链接:https://arxiv.org/abs/2503.12605
- 项目主页:https://github.com/yaotingwangofficial/Awesome-MCoT
核心创新点:
1. 多模态思维链
(MCoT)方法论体系
- 模态适配推理机制 :提出针对图像、视频、音频、3D及结构化数据的专用推理框架(如Multimodal-CoT、Video-of-Thought、Audio-CoT、Cot3DRef),通过模态特性分解任务步骤,提升跨模态复杂任务的可解释性与性能。
- 结构化数据处理范式 :引入Chain-of-Command(TableGPT)和Chain-of-Table,通过命令集(如SelectCondition、GroupBy)动态生成操作序列,实现表格数据的精准语义解析与重建。
2. 细粒度视觉推理与注意力模拟
- 视觉注意力机制:ReFocus通过编辑操作(如高亮、掩码)模拟人类注意力机制,增强结构化数据(如表格、医学影像)的细粒度理解能力。
- 动态实例定位 :Image-of-Thought结合文本与视觉检索动态定位目标对象,支持复杂场景下的语义 grounding。
3. 多模态生成与推理协同优化
- 生成增强推理 :RPG-DiffusionMaster通过MCoT分解文本提示为子区域生成指导,提升文本到图像扩散模型的一致性;L3GO提出Chain-of-3D-Thoughts框架,实现非常规3D对象的生成。
- 程序化推理合成 :3D-PreMise融合LLM与程序合成生成参数化3D形状,通过显式推理示例指导工业设计。
4. 领域专用推理范式
- 医疗健康 :StressSelfRefine采用心理学启发的“描述-评估-高亮”流程检测视频压力信号;MedCoT通过分层专家机制优化医学诊断推理。
- 具身智能与机器人 :E-CoT结合目标定位与抓取位姿推理提升机器人交互能力;SpatialCoT通过坐标对齐与空间推理优化具身任务规划。
5. 基准与评估体系
- 多模态推理基准 :构建M3CoT、VMMMU等跨领域基准,覆盖科学问答(ScienceQA)、视频推理(VideoCoT)及医疗诊断(MathVista),系统评估MCoT的鲁棒性与效率。
6. 数据增强与知识注入
- 自动化数据生成 :G-CoT、PS-CoT通过任务分解自动生成标注推理轨迹,缓解数据依赖问题。
- 外部知识整合 :KAM-CoT引入知识库增强,HoT通过超图连接多推理节点,提升复杂任务的知识覆盖率。
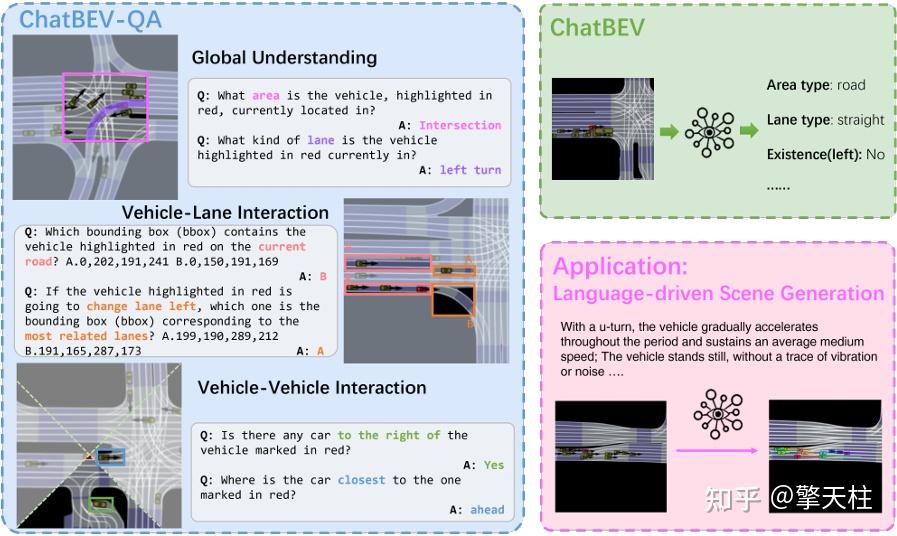
ChatBEV
- 论文标题:ChatBEV: A Visual Language Model that Understands BEV Maps
- 论文链接:https://arxiv.org/abs/2503.13938
核心创新点:
1. 首个BEV场景理解VQA基准(ChatBEV-QA)
- 构建了包含137k+问答对的大规模BEV地图问答数据集,覆盖全局场景理解 (区域/车道类型)、车辆-车道交互 (定位/导航推理)和车辆-车辆交互 (存在性/相对方位)三大维度,填补了BEV地图多任务理解的基准空白。
2. 自动化数据生成管道
- 提出基于规则函数的标注系统和模板化问题生成框架,通过轨迹预测车道匹配 、空间关系量化 等技术自动生成高质量VQA数据,突破传统人工标注的规模限制。
3. BEV专用视觉语言模型
(ChatBEV)
- 采用视觉指令调优(Visual Instruction Tuning)策略,基于LLaVA等预训练模型进行LoRA微调,首次实现BEV地图的细粒度语义解析,包括车道拓扑推理、动态交互建模等能力。
4. 语言驱动的场景生成框架
- 将ChatBEV的全局场景编码 (区域/车道类型)与导航推理 (车道中心线预测)嵌入扩散模型,显著提升生成场景的语义一致性和交通规则符合度,实现语言约束下的可控场景生成。
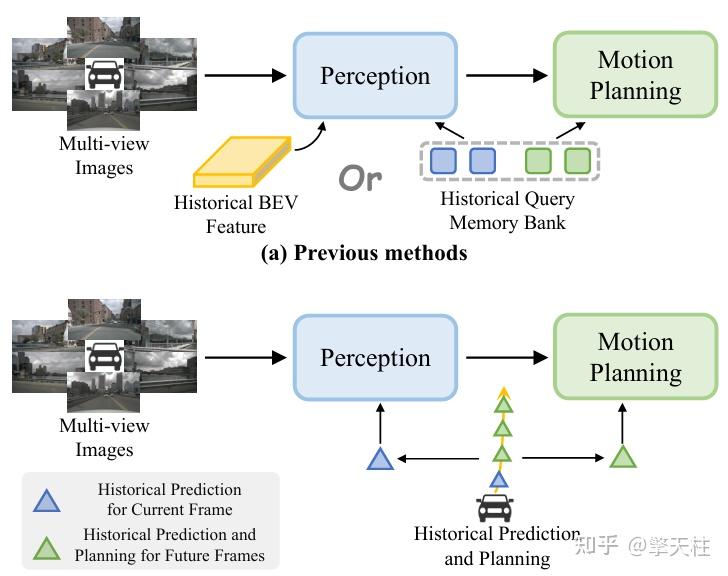
Bridging Past and Future
- 论文标题:Bridging Past and Future: End-to-End Autonomous Driving with Historical Prediction and Planning
- 论文链接:https://arxiv.org/abs/2503.14182
核心创新点:
1. 多步骤查询分解机制
- 提出将运动预测(motion prediction)与路径规划(planning)的查询(queries)分解为多时间步粒度 (multi-step queries),即对每个未来时间步单独建模(如预测轨迹的每一步对应独立查询),突破传统方法中单查询表征整条轨迹的局限性。这一设计使历史预测与规划信息能按时间步精准对齐,增强时序一致性。
2. 历史信息分层融合架构
- 感知阶段 :通过Historical Mot2Det Fusion模块 ,将历史运动预测查询(historical motion queries)与当前帧目标检测查询(object queries)跨模态交互,提升动态物体感知精度。
- 规划阶段 :在History-Enhanced Planning模块 中,将历史规划查询(historical planning queries)与未来多步规划查询结合,利用历史决策经验优化当前规划策略。
3. 时序一致性交互模块
- 设计Step-Level Mot2Plan Interaction ,强制对齐运动预测与规划的时间步级交互 (如将周围车辆的未来状态预测与自车规划轨迹在对应时间步关联),解决传统方法中预测与规划分离导致的动态场景不一致问题,显著降低碰撞率(collision rate)。
发表回复